


TL;DR – สรุปสั้นสำหรับคนไม่มีเวลาอ่านยาว
ท่าวิ่งของคุณมีผลโดยตรงต่ออาการบาดเจ็บที่สะสม และประสิทธิภาพของการวิ่งโดยรวม
EP นี้พาไปรู้จักหลักการเบื้องหลัง Running Gait ที่สำคัญ เช่น การลงเท้า, การเคลื่อนที่ของข้อสะโพก-เข่า-ข้อเท้า, กล้ามเนื้อสองข้อ (biarticular muscles), และบทบาทของเอ็นที่ช่วยคืนพลังในแต่ละก้าว
เข้าใจเรื่องนี้แล้ว คุณจะรู้ว่า “ท่าวิ่งที่ดี” ไม่ได้แค่สวย แต่ช่วยให้ วิ่งลื่นขึ้น เจ็บน้อยลง และประหยัดแรงมากขึ้น
บทความนี้เรียบเรียงจากสคริปต์พอดแคสต์ Citytrail Talk EP202 พร้อมข้อมูลสรุปจากงานวรรณกรรมทางชีวกลศาสตร์ที่วิเคราะห์รูปแบบการวิ่ง (Running Gait) อย่างละเอียด โดยเน้นทั้งโครงสร้าง กลไก และแรงที่เกิดขึ้นในร่างกาย เพื่อให้ผู้อ่านเข้าใจว่าการวิ่งที่ดูเหมือนง่าย ๆ นั้น แท้จริงแล้วซับซ้อนและสัมพันธ์กับอาการบาดเจ็บในนักวิ่งอย่างลึกซึ้ง
1. ความเป็นมาและการเติบโตของความสนใจในการวิเคราะห์การวิ่ง
- การศึกษาการเคลื่อนไหวของมนุษย์เริ่มต้นมาตั้งแต่ยุคกรีกโบราณ จากผลงานของอริสโตเติล จนถึงลีโอนาร์โด ดา วินชี และพัฒนาต่อเนื่องมาถึงศตวรรษที่ 19 ผ่านผลงานของพี่น้อง Weber และ Etienne Jules Marey ผู้สร้างเครื่องวัดแรงกดที่ใช้ในงานวิจัยการเดินครั้งแรก
- กระแสการวิ่งเพื่อสุขภาพในยุค 1960s–1970s ทำให้เกิดงานวิจัยจำนวนมากที่พยายามอธิบายว่าทำไมคนจำนวนมากถึงได้รับบาดเจ็บซ้ำในลักษณะเดิม ๆ ทั้งที่วิ่งเป็นประจำ ช่องว่างระหว่างแพทย์กับนักชีวกลศาสตร์ยังคงมีอยู่ ทำให้การนำข้อมูลไปใช้ในคลินิกยังไม่เต็มประสิทธิภาพ
ประวัติโดยย่อของ Dr. Stanley L. James
Stanley L. James, Md (07/02/1931 – 01/10/2022)
Dr. Stanley L. James (สแตนลีย์ แอล. เจมส์) นายแพทย์ผู้ล่วงลับในวัย 90 ปี เมื่อวันที่ 10 มกราคม 2565 เป็นบุคคลสำคัญในวงการแพทยศาสตร์การกีฬาและศัลยกรรมกระดูก ท่านเกิดเมื่อวันที่ 2 กรกฎาคม 2474 ที่รัฐไอโอวา สหรัฐอเมริกา
เส้นทางอาชีพอันโดดเด่น:
หลังจากสำเร็จการศึกษาระดับปริญญาตรี Dr. James เข้ารับราชการในกองทัพในตำแหน่งนักบิน ก่อนจะกลับมาศึกษาต่อด้านการแพทย์ที่มหาวิทยาลัยไอโอวาจนสำเร็จการศึกษาในปี 2505 และในปี 2510 ท่านได้ย้ายมาที่รัฐออริกอน เพื่อร่วมงานกับ Dr. Don Slocum โดยมุ่งเน้นที่การผ่าตัดมือ จากนั้นจึงขยายมาสู่เวชศาสตร์การกีฬา โดยเฉพาะการรักษาอาการบาดเจ็บที่หัวเข่าและอาการบาดเจ็บที่พบบ่อยในนักวิ่ง Dr. James ทำงานที่ Slocum Orthopedics มายาวนานถึง 50 ปี จนถึงปี 2560
ผลงานและเกียรติประวัติ:
Dr. James มีชื่อเสียงโด่งดังในฐานะศัลยแพทย์กระดูกและผู้เขียนบทความทางวิชาการกว่า 57 ชิ้นในวารสารและหนังสือทางการแพทย์ ท่านยังได้ร่วมมือกับ Bill Bowerman ผู้ร่วมก่อตั้ง Nike ในช่วงต้นทศวรรษ 2510 เพื่อร่วมพัฒนาการออกแบบรองเท้า Nike นอกจากนี้ ท่านยังเป็นสมาชิกผู้ก่อตั้ง American Orthopaedic Society for Sports Medicine และดำรงตำแหน่งผู้อำนวยการแพทย์ของการแข่งขัน US Olympic Track and Field Trials ในปี 2519, 2523 และ 2551 รวมถึงเป็นแพทย์ประจำทีม Athletic West และทีมกรีฑาของมหาวิทยาลัยออริกอน
ตลอดอาชีพการงาน Dr. James ยังคงมีความผูกพันกับ University of Iowa’s Carver School of Medicine และได้รับรางวัล Distinguished Alumnus Award for Achievement จากสมาคมศิษย์เก่าของมหาวิทยาลัยไอโอวาในปี 2555 สำหรับผลงานดีเด่นในด้านเวชศาสตร์การกีฬา ในปี 2553 ท่านได้รับเลือกให้เป็นสมาชิกของ University of Oregon Track and Field Hall of Fame เพื่อยกย่องคุณูปการทางการแพทย์
นอกจากผลงานอันยาวนานในสาขาเวชศาสตร์การกีฬาและการวิจัยชีวกลศาสตร์เกี่ยวกับการวิเคราะห์ท่าวิ่งแล้ว Dr. James ยังเป็นนักกีฬาตัวยง ทั้งการเล่นสกีวิบาก การวิ่ง และการปั่นจักรยาน โดยเข้าร่วมการแข่งขันในฐานะนักกีฬาระดับมาสเตอร์ที่มีฝีมือดีเยี่ยมแม้ในวัยชรา
Dr. James จากไปโดยมีภรรยา Julie James, น้องสาว Jean James Linda, บุตร Heather, Brett และ Blake และหลาน Thailer, Morgan, Marcus และ Kora พิธีรำลึกถึงท่านมีกำหนดจัดขึ้นในเดือนกรกฎาคม 2565
2. วงจรการเดินและการเปลี่ยนแปลงตามความเร็ว (Gait Cycle)
การเดินมีช่วงที่เท้าทั้งสองสัมผัสพื้น (double support) แต่การวิ่งไม่มี มีแต่ช่วงที่ลอยตัว (double float)
- นักวิ่งระยะไกลส่วนใหญ่ (~80%) ลงส้น (rearfoot striker)
- นักสปรินต์ลงปลายเท้า (forefoot striker) โดยส้นเท้าอาจไม่แตะพื้นเลย
ความเร็วที่เพิ่มขึ้นทำให้ตำแหน่งและเวลาของการสัมผัสพื้นเปลี่ยนไป ระยะยืนสั้นลง และศูนย์กลางมวลของร่างกายต้องถูกผลักไปข้างหน้าให้เร็วขึ้น
จุดแบ่งระหว่างการเดินและการวิ่ง: การแบ่งแยกระหว่างการเดินและการวิ่งเกิดขึ้นเมื่อ “ช่วงเวลาของการรองรับสองข้าง (ทั้งสองเท้าสัมผัสพื้นพร้อมกัน) ในระยะยืนของการเดิน ให้ทางกับสองช่วงของการลอยตัวสองข้าง (ไม่มีเท้าสัมผัสพื้น) ในช่วงเริ่มต้นและสิ้นสุดของระยะเหวี่ยงของการเดิน” โดยทั่วไป เมื่อความเร็วเพิ่มขึ้น การสัมผัสเริ่มต้นจะเปลี่ยนจากส้นเท้าไปที่ปลายเท้า
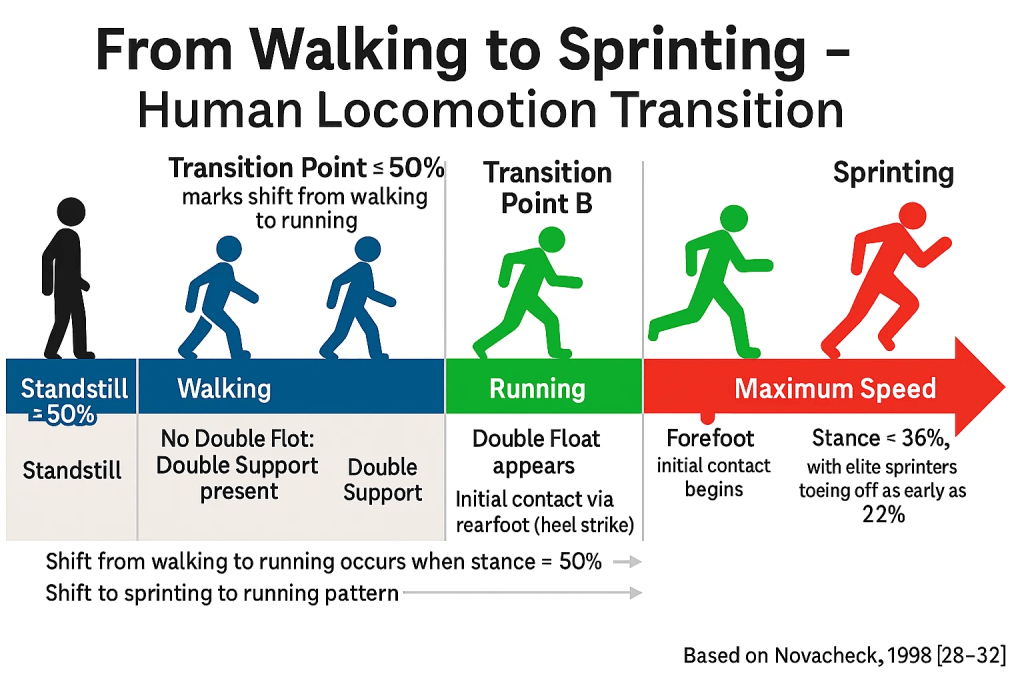
การเปลี่ยนผ่านของรูปแบบการเคลื่อนไหวจากการเดินสู่การวิ่งและการสปรินต์
อินโฟกราฟิกนี้แสดงการเปลี่ยนแปลงของวัฏจักรการก้าว (gait cycle) ตั้งแต่การเดิน → การวิ่ง → การสปรินต์ โดยมีจุดเปลี่ยนสำคัญ 2 จุด:
- Transition Point A: จุดที่อัตราส่วนของการยืนถ่วง (stance phase) ลดลงเหลือประมาณ 50% ซึ่งเป็นช่วงที่ลักษณะการเดินเปลี่ยนเป็นการวิ่ง โดยมีการหายไปของช่วง “Double Support” (เท้าทั้งสองแตะพื้นพร้อมกัน) และเริ่มมีช่วง “Double Float” (เท้าลอยทั้งสองข้าง)
- Transition Point B: จุดที่ลักษณะการลงเท้าเปลี่ยนจากส้นเท้า (rearfoot strike) ไปเป็นปลายเท้า (forefoot strike) เป็นลักษณะเฉพาะของการสปรินต์
ในการวิ่งระดับสูง ระยะเวลาที่เท้าสัมผัสพื้นจะสั้นลงเหลือน้อยกว่า 36% ของวัฏจักรการก้าว และนักวิ่งระดับโลกอาจยกเท้าออกจากพื้นเร็วที่สุดตั้งแต่ 22% ของวัฏจักร
ที่มา: Novacheck, 1998 [28–32]
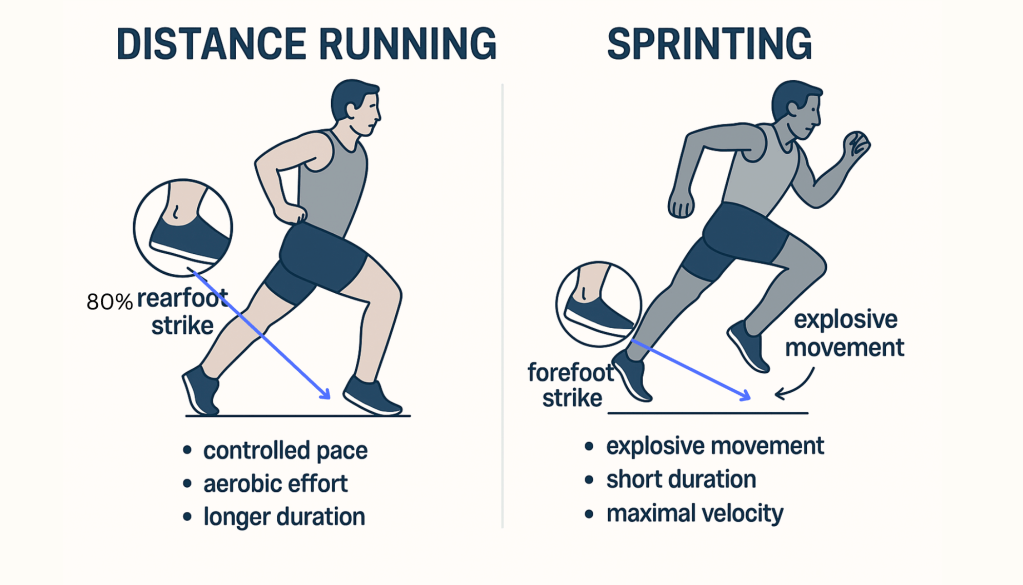
ภาพนี้แสดงให้เห็นความแตกต่างของ รูปแบบการลงเท้า, รูปแบบพลังงานที่ใช้, และ ลักษณะของการเคลื่อนไหว ระหว่างการวิ่งระยะไกลและการสปรินต์
จากข้อมูลทางชีวกลศาสตร์พบว่า นักวิ่งระยะไกลประมาณ 80% จะลงเท้าแบบ ส้นเท้าสัมผัสพื้นก่อน (rearfoot strike) ขณะที่ที่เหลือส่วนใหญ่เป็น midfoot strike ซึ่งเป็นการวิ่งแบบควบคุมจังหวะ ใช้พลังงานแอโรบิก และเน้นความอึดในการวิ่งระยะยาว
ในทางตรงกันข้าม นักวิ่งระยะสั้น (sprinters) โดยเฉพาะในระดับสูงสุด จะมี การลงเท้าด้วยปลายเท้า (forefoot strike) และในบางคนอาจไม่มีการแตะพื้นของส้นเท้าเลย การวิ่งแบบนี้มุ่งเน้นความเร็วสูงสุดในระยะเวลาสั้น ใช้พลังระเบิดของกล้ามเนื้อเพื่อเร่งความเร็วสูงสุด
ที่มา: Novacheck, 1998 [27]
- วิ่ง vs. สปรินต์:การวิ่ง: ทำในระยะทางที่ไกลขึ้น เน้นความอดทน และใช้การเผาผลาญแบบใช้ออกซิเจนเป็นหลัก เช่น การวิ่งจ็อกกิ้ง การแข่งบนถนน และมาราธอน นักวิ่งระยะไกลประมาณ 80% เป็นผู้ลงส้นเท้า (rearfoot strikers) [27]
- การสปรินต์: ทำในระยะทางสั้นลงด้วยความเร็วที่สูงขึ้น โดยมีเป้าหมายคือครอบคลุมระยะทางสั้นๆ ในเวลาที่สั้นที่สุดเท่าที่จะทำได้ นักสปรินต์ชั้นนำจะสัมผัสพื้นด้วยปลายเท้า และบางครั้งส้นเท้าอาจไม่สัมผัสพื้นเลย
- วงจรการเดิน: เป็นหน่วยวัดพื้นฐานในการวิเคราะห์การเดิน โดยเริ่มเมื่อเท้าข้างหนึ่งสัมผัสพื้นและสิ้นสุดเมื่อเท้าเดิมสัมผัสพื้นอีกครั้ง
- การเดิน: ระยะยืนนานกว่า 50% ของวงจรการเดิน มีสองช่วงของการรองรับสองข้าง (เท้าทั้งสองสัมผัสพื้น)
- การวิ่ง: ปลายเท้าลอยขึ้นก่อนที่ 50% ของวงจรการเดินจะเสร็จสิ้น ไม่มีช่วงที่เท้าทั้งสองสัมผัสพื้น แต่มีสองช่วงที่เท้าทั้งสองข้างลอยอยู่กลางอากาศ (double float) ระยะยืนจะสั้นลงเมื่อนักกีฬาเคลื่อนที่เร็วขึ้น โดยนักสปรินต์ระดับโลกอาจยกปลายเท้าขึ้นเร็วถึง 22% ของวงจรการเดิน [32]
- การดูดซับและการสร้างพลังงาน: ไม่ว่าจะด้วยความเร็วเท่าใด การวิ่งจะประกอบด้วยช่วงการเร่งความเร็วและการลดความเร็วสลับกัน ซึ่งเรียกว่า “การดูดซับ” (absorption) และ “การสร้าง” (generation) [Fig. 2c,d]
- การดูดซับ: ศูนย์กลางมวลของร่างกายลดลงจากความสูงสูงสุดในช่วงลอยตัวสองข้าง ความเร็วของศูนย์กลางมวลจะชะลอตัวในแนวนอน
- การสร้าง: หลังจากการกลับทิศทางในระยะยืน ศูนย์กลางมวลจะถูกผลักขึ้นและไปข้างหน้า พลังงานศักย์และพลังงานจลน์เพิ่มขึ้น
การเปรียบเทียบวงจรการก้าว (Gait Cycle) ของการเดิน การวิ่ง และการสปรินต์

การเปรียบเทียบวงจรการก้าว (Gait Cycle) ของการเดิน การวิ่ง และการสปรินต์
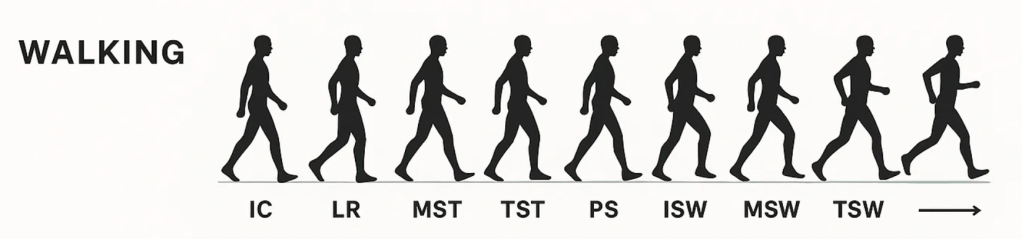
วงจรการก้าวขณะเดิน (Walking Gait Cycle)
ภาพนี้แสดงลำดับเฟสของการเดินของมนุษย์ตามลำดับการเคลื่อนไหวของขาและเท้า โดยมีคำย่อดังนี้:
- IC – Initial Contact: จุดที่เท้าสัมผัสพื้นครั้งแรก
- LR – Loading Response: ช่วงที่ร่างกายเริ่มรับน้ำหนัก
- MST – Mid Stance: ช่วงกลางของการยืนบนขาข้างเดียว
- TST – Terminal Stance: ช่วงสิ้นสุดการยืนก่อนยกเท้า
- PS – Pre Swing: ช่วงเตรียมยกเท้าเพื่อเหวี่ยง
- ISW – Initial Swing: เริ่มเหวี่ยงขาไปข้างหน้า
- MSW – Mid Swing: ขาอยู่กลางทางในการเหวี่ยง
- TSW – Terminal Swing: ช่วงสุดท้ายก่อนเท้าแตะพื้นอีกครั้ง
การเข้าใจแต่ละเฟสเหล่านี้มีความสำคัญต่อการวิเคราะห์การเคลื่อนไหว และช่วยในการประเมินหรือปรับปรุงท่าทางการเดินให้เหมาะสม
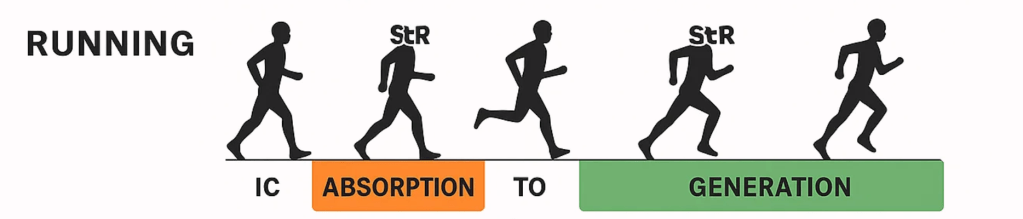
วัฏจักรการวิ่ง (Running Gait Cycle) กับการดูดซับและสร้างพลังงาน
ภาพนี้แสดงลำดับของการเคลื่อนไหวขณะวิ่ง โดยเน้นเฟสสำคัญ 2 ช่วงใน stance phase ได้แก่:
- Absorption (ดูดซับแรง): เริ่มต้นที่จุดสัมผัสพื้น (IC – Initial Contact) ร่างกายจะลดความเร็วและดูดซับแรงกระแทกจากพื้น โดยเฉพาะผ่านกล้ามเนื้อ eccentric เช่น hamstrings และ quadriceps
- Generation (สร้างพลังงาน): หลังจาก toe-off (TO) และเข้าสู่จุดกลับทิศของเฟสยืน (StR – Stance Phase Reversal) ร่างกายจะผลักตัวออกจากพื้นและสร้างแรงขับเคลื่อนไปข้างหน้า โดยอาศัยกล้ามเนื้อ concentric และพลังงานที่สะสมในเส้นเอ็น
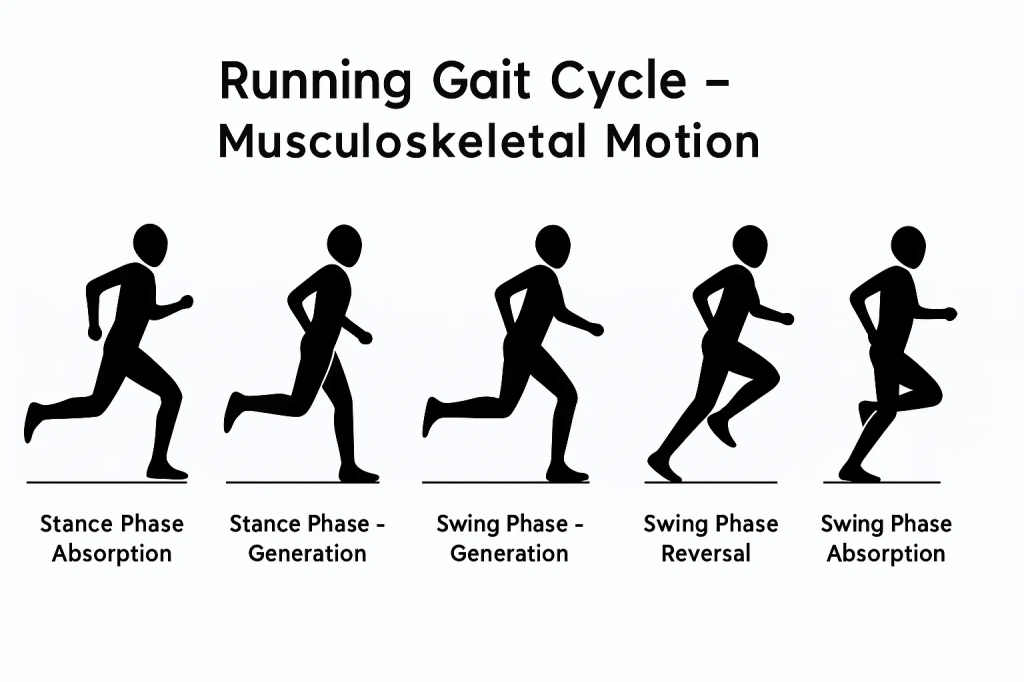
วัฏจักรการวิ่ง – การเคลื่อนไหวของระบบกล้ามเนื้อและกระดูก (Musculoskeletal Motion)
อินโฟกราฟิกนี้แสดงลำดับการเคลื่อนไหวของร่างกายระหว่างการวิ่ง แบ่งออกเป็น 5 เฟสหลัก โดยแต่ละช่วงมีบทบาทเฉพาะในการเคลื่อนที่อย่างมีประสิทธิภาพและลดความเสี่ยงต่อการบาดเจ็บ:
- Stance Phase – Absorption: ช่วงรับแรงกระแทกเมื่อเท้าสัมผัสพื้น กล้ามเนื้อทำงานแบบยืดต้าน (eccentric) เพื่อชะลอแรง
- Stance Phase – Generation: กล้ามเนื้อเริ่มผลักตัวออกจากพื้นเพื่อสร้างแรงขับเคลื่อน
- Swing Phase – Generation: ขาถูกเหวี่ยงไปข้างหน้าเพื่อเตรียมพร้อมสำหรับการก้าวถัดไป
- Swing Phase – Reversal: ขาอยู่ในจุดสูงสุด เตรียมเปลี่ยนทิศทางเพื่อวางเท้า
- Swing Phase – Absorption: ร่างกายเตรียมรับแรงอีกครั้งในการก้าวต่อไป
ภาพนี้สะท้อนแนวคิดว่าการวิ่งคือกระบวนการที่ร่างกายใช้กลไกทั้งการดูดซับและการสร้างพลังงานผ่านกล้ามเนื้อ เส้นเอ็น และจังหวะการเคลื่อนไหวอย่างแม่นยำ
ลำดับนี้อ้างอิงจากภาพเคลื่อนไหวในงานวิจัยด้านชีวกลศาสตร์ของ T.F. Novacheck (1998) ซึ่งสร้างขึ้นด้วยซอฟต์แวร์ SIMM (Software for Musculoskeletal Modelling) เพื่อแสดงพฤติกรรมของกล้ามเนื้อ-กระดูกในระหว่างการวิ่ง
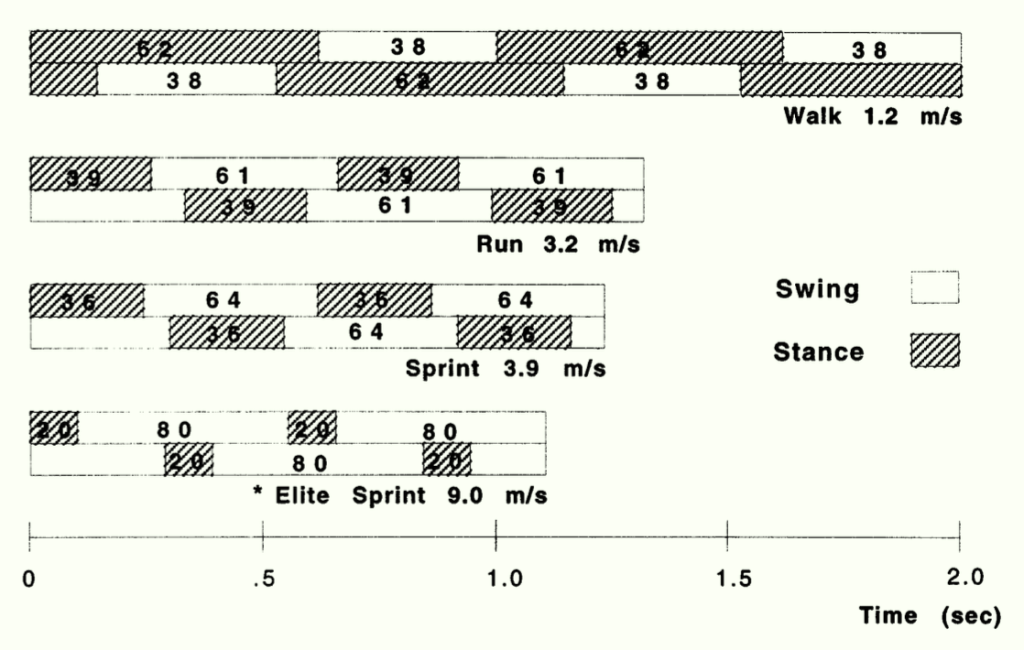
การเปลี่ยนแปลงของพารามิเตอร์ในรอบการก้าว (Gait Cycle) ตามความเร็วของการเคลื่อนไหว
แผนภาพแท่งแนวนอนนี้แสดงรอบการก้าว (gait cycle) สองรอบที่เริ่มต้นจากช่วงที่เท้าแตะพื้น (Initial Contact – IC) สำหรับแต่ละเงื่อนไขของการเดิน วิ่ง และวิ่งเร็ว (sprinting) โดยแบ่งเป็นสองเฟสหลัก ได้แก่เฟสเหยียบพื้น (Stance Phase – พื้นที่แรเงา) และเฟสเหวี่ยงขา (Swing Phase – พื้นที่ขาว)
สังเกตได้ว่า เมื่อความเร็วเพิ่มขึ้น:
- เวลาในเฟสเหยียบพื้นจะลดลง
- เวลาในเฟสเหวี่ยงขาจะเพิ่มขึ้น
- ระยะเวลาที่ทั้งสองเท้าไม่แตะพื้น (Double Float) จะเพิ่มขึ้น
- รอบการก้าวจะสั้นลงอย่างเห็นได้ชัด
ข้อมูลมาจากห้องปฏิบัติการวิเคราะห์การเคลื่อนไหว (Motion Analysis Lab) ที่ Gillette Children’s Specialty Healthcare *ข้อมูลของนักวิ่งระดับโลก (Elite Sprint) มาจาก Vaughan [16]
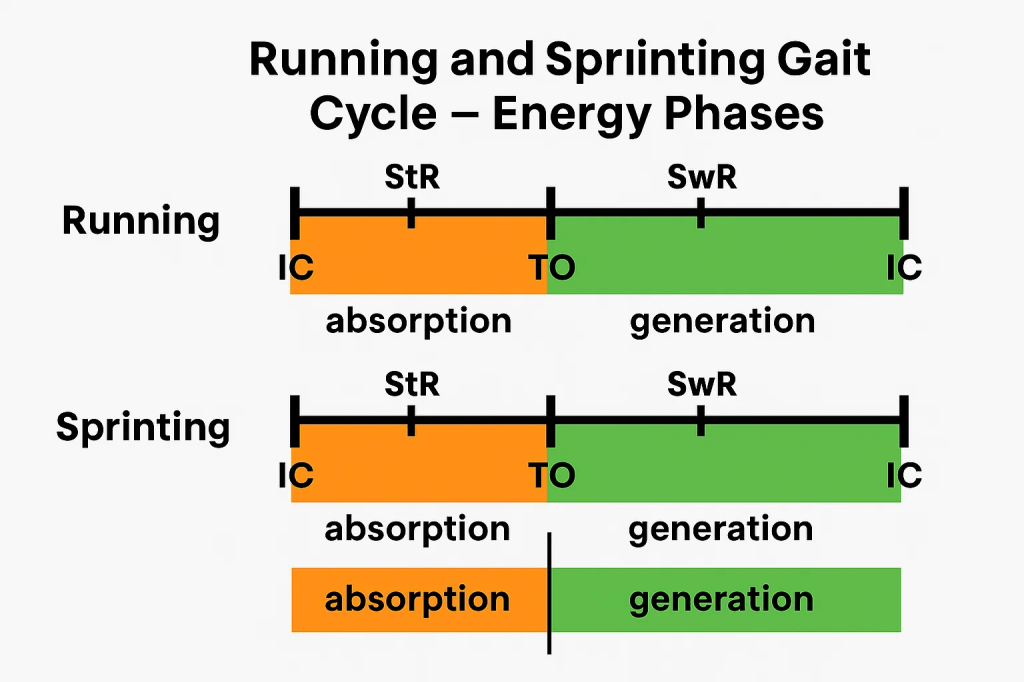
วัฏจักรการก้าวของการวิ่งและการสปรินต์ – เฟสของพลังงาน
อินโฟกราฟิกนี้แสดงลำดับเฟสของวัฏจักรการก้าว (gait cycle) เปรียบเทียบระหว่างการ วิ่ง (Running) และการ สปรินต์ (Sprinting) โดยใช้เหตุการณ์สำคัญในวัฏจักร ได้แก่:
- IC – Initial Contact: จุดที่เท้าสัมผัสพื้น
- TO – Toe Off: จุดที่ปลายเท้ายกจากพื้น
- StR – Stance Phase Reversal: จุดกลับทิศในช่วงเท้าสัมผัสพื้น
- SwR – Swing Phase Reversal: จุดกลับทิศในช่วงแกว่งขา
การเคลื่อนไหวแบ่งออกเป็น 2 เฟสหลัก:
- Absorption (ดูดซับพลังงาน): ตั้งแต่ SwR → IC → StR ร่างกายดูดซับแรงกระแทกจากพื้น
- Generation (สร้างพลังงาน): ตั้งแต่ StR → TO → SwR ร่างกายผลักตัวเพื่อสร้างแรงขับเคลื่อนไปข้างหน้า
แม้การวิ่งและการสปรินต์จะมีเฟสเหมือนกัน แต่สัดส่วนเวลาและความเข้มข้นของแรงในแต่ละช่วงแตกต่างกันชัดเจน
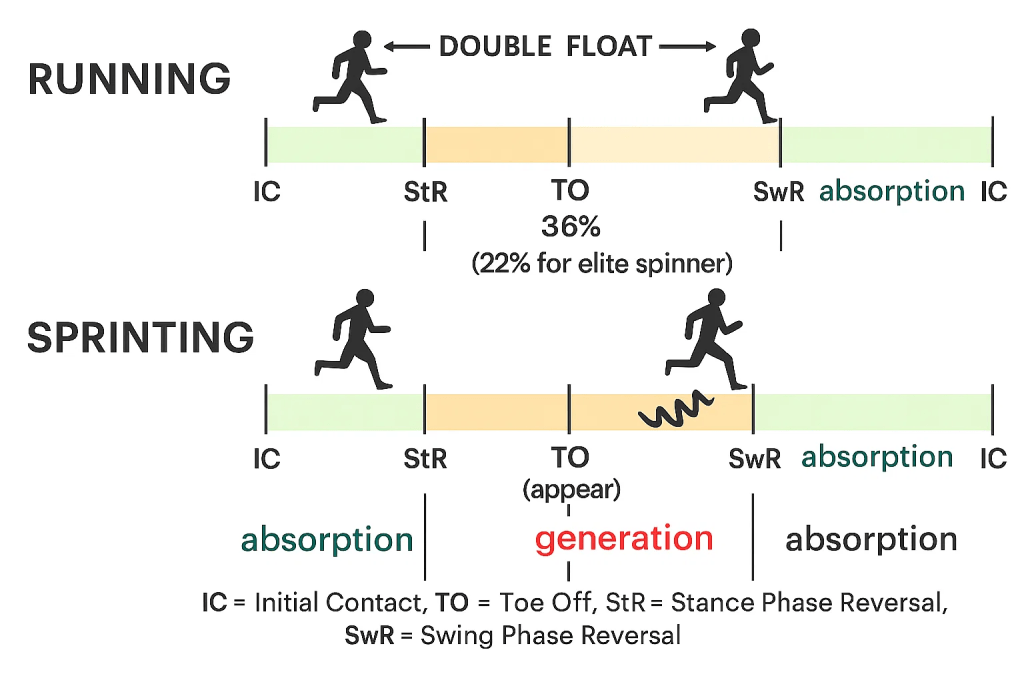
อินโฟกราฟิกนี้แสดงการเปรียบเทียบวัฏจักรการก้าว (Gait Cycle) สำหรับการ การวิ่ง (Running) และการสปรินต์ (Sprinting) โดยเริ่มจากจุดสัมผัสพื้น (IC: Initial Contact) ไปจนถึงการสัมผัสพื้นอีกครั้งหนึ่งในรอบถัดไป
🔹 Running (การวิ่ง)
- Toe Off (TO) เกิดขึ้นที่ประมาณ 39% ของวัฏจักร
- ไม่มีช่วงที่เท้าทั้งสองข้างแตะพื้นพร้อมกัน
- มีช่วง Double Float สองครั้งในช่วงเหวี่ยงขา (Swing Phase)
🔹 Sprinting (การสปรินต์)
- TO เกิดขึ้นเร็วกว่า โดยอยู่ที่ประมาณ 36%
- นักวิ่งระดับโลกสามารถ TO ได้เร็วถึง 22% ของวัฏจักร
- ใช้เวลาบนพื้น (Stance Phase) น้อยที่สุด และมีช่วง Double Float ที่ชัดเจนยิ่งขึ้น
ภาพนี้เน้นให้เห็นถึงลักษณะการใช้พลังงานและจังหวะการเคลื่อนไหวของร่างกายในแต่ละรูปแบบการเคลื่อนที่ พร้อมแสดงสัดส่วนเวลาและจุดเปลี่ยนสำคัญภายในรอบการก้าว
ที่มา: อ้างอิงจาก Novacheck, 1998 [26–32]
3. กิจกรรมทางไฟฟ้าของกล้ามเนื้อ (EMG)
- การกระตุ้นกล้ามเนื้อ: กล้ามเนื้อส่วนใหญ่จะทำงานมากที่สุดเพื่อเตรียมพร้อมและหลังจากสัมผัสพื้น การหดตัวของกล้ามเนื้อมีความสำคัญมากกว่าในช่วงการเตรียมตัวและการออกจากพื้น “การหดตัวของกล้ามเนื้อมีความสำคัญมากกว่าในช่วงการเตรียมตัวและการออกจากพื้น” [Section 3] ซึ่งสอดคล้องกับแนวคิดที่ว่าการเตรียมตัวสำหรับการสัมผัสพื้นมีความสำคัญมากกว่าการเตรียมตัวเพื่อออกจากพื้น
- การทำงานของกล้ามเนื้อหลัก:Quadriceps และ Rectus Femoris: ทำงานตั้งแต่ช่วงปลายระยะเหวี่ยงถึงกลางระยะยืน เพื่อเตรียมแขนขาสำหรับการสัมผัสพื้นและดูดซับแรงกระแทกในช่วงดูดซับของระยะยืน Rectus femoris ซึ่งเป็นกล้ามเนื้อสองข้อต่อ (biarticular muscle) อาจมีบทบาทในการถ่ายโอนพลังงานระหว่างส่วนต่างๆ ของร่างกาย
- Hamstrings และ Hip Extensors/Gastrosoleus: มีเวลาการกระตุ้นที่คล้ายคลึงกัน Hamstrings และ hip extensors จะเหยียดสะโพกในช่วงครึ่งหลังของระยะเหวี่ยงและครึ่งแรกของระยะยืน Hamstrings ยังชะลอโมเมนตัมของกระดูกหน้าแข้ง (tibia) ก่อนการสัมผัสพื้น Hamstrings และ gastrosoleus มีหน้าที่ทั้งแบบยืดคลายตัว (eccentric) และหดตัว (concentric) ที่สำคัญ
- Anterior Tibialis: หงายข้อเท้าขึ้นเพื่อเพิ่มระยะห่างจากพื้นในระยะเหวี่ยง (concentric) และควบคุมการลดปลายเท้าลงสู่พื้นในช่วงแรกของระยะยืน (eccentric)
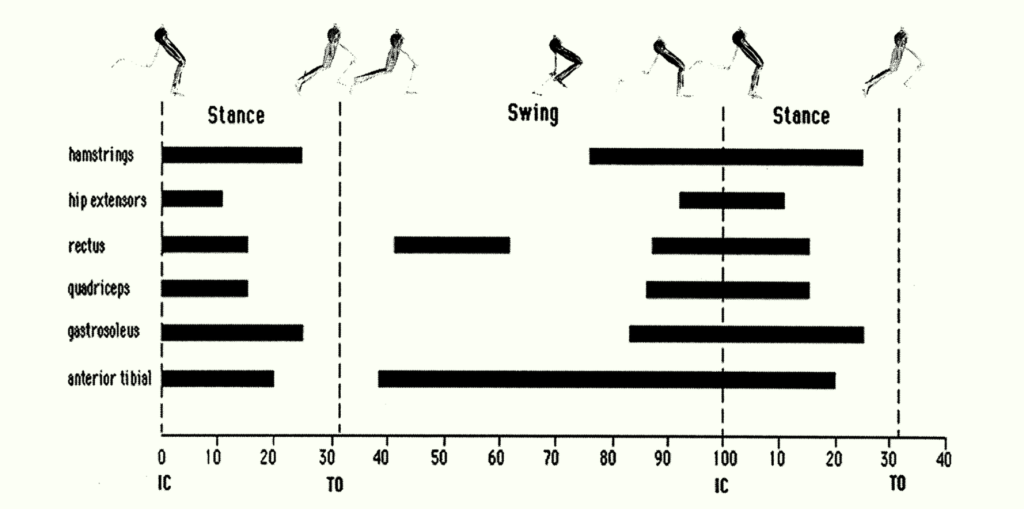
การทำงานของกล้ามเนื้อในหนึ่งรอบของวัฏจักรการวิ่ง (Running Gait Cycle)
แสดงการทำงานของกล้ามเนื้อหลัก ได้แก่
- Hamstrings (กล้ามเนื้อหลังต้นขา)
- Hip extensors (กล้ามเนื้อเหยียดสะโพก)
- Rectus (กล้ามเนื้อ rectus femoris หรือกล้ามเนื้อหน้าต้นขาส่วนหนึ่งของ quadriceps)
- Quadriceps (กล้ามเนื้อหน้าต้นขา)
- Gastrosoleus (กล้ามเนื้อน่อง – รวม gastrocnemius และ soleus)
- Anterior tibial (กล้ามเนื้อหน้าแข้งหรือ tibialis anterior)
โดยแถบสีดำแทนช่วงเวลาที่กล้ามเนื้อแต่ละมัดทำงานในเฟสต่างๆ ของวัฏจักรการวิ่ง
- ช่วง Stance Phase (เท้าแตะพื้น): มีกล้ามเนื้อหลายกลุ่มทำงานพร้อมกัน โดยเฉพาะ hamstrings และ gastrosoleus ซึ่งช่วยในการรับแรงกระแทกและการผลักตัว
- ช่วง Swing Phase (เท้าเหวี่ยง): มีกล้ามเนื้อ anterior tibial และ rectus ทำงานเพื่อยกเท้าและเตรียมการลงพื้น
- สังเกตได้ว่า:
- มีกล้ามเนื้อทำงานมากที่สุดใกล้กับช่วง initial contact (IC)
- ขณะที่ช่วง toe off (TO) กล้ามเนื้อส่วนใหญ่หยุดทำงาน
แผนภาพนี้ช่วยให้เข้าใจลำดับการเกร็งตัวของกล้ามเนื้อในแต่ละช่วงของวัฏจักรการวิ่ง ซึ่งมีประโยชน์ต่อการออกแบบโปรแกรมฝึกซ้อม ฟื้นฟู และป้องกันการบาดเจ็บของนักวิ่ง
(ที่มา: Mann and Hagy [32], ดัดแปลงโดยการแสดงผลแบบ 1.3 รอบวัฏจักรเพื่อความต่อเนื่องของข้อมูล)
4. จลนศาสตร์ (Kinematics)
จลนศาสตร์คือการอธิบายการเคลื่อนไหวโดยไม่พิจารณาแรงที่ทำให้เกิดการเคลื่อนไหวเหล่านั้น
4.1 แนวระนาบ Sagittal (หน้า-หลัง):
- การเอียงของเชิงกรานและลำตัว: เมื่อความเร็วเพิ่มขึ้น เชิงกรานและลำตัวจะเอียงไปข้างหน้ามากขึ้นเพื่อลดศูนย์กลางมวล และเพิ่มแรงในแนวนอนเพื่อการผลักไปข้างหน้า “การเอียงลำตัวไปข้างหน้าและการเอียงเชิงกรานช่วยรักษากองกำลังปฏิกิริยาพื้นดินให้อยู่ในตำแหน่งที่ช่วยให้เร่งความเร็วไปข้างหน้าได้”
- การเคลื่อนที่ของสะโพก: ในการวิ่งและการสปรินต์ การยืดสะโพกสูงสุดจะเกิดขึ้นช้ากว่าการเดินเล็กน้อย (ที่จังหวะยกเท้าพ้นพื้น) เมื่อความเร็วเพิ่มขึ้น การงอสะโพกสูงสุดก็จะเพิ่มขึ้น นำไปสู่ก้าวที่ยาวขึ้น
- การเคลื่อนที่ของหัวเข่า: ในช่วงการดูดซับของการวิ่ง หัวเข่าจะงอประมาณ 45° และยืดออกไป 25° ในช่วงการผลัก การสปรินต์มีการงอหัวเข่าที่น้อยกว่าและมีการยืดออกที่มากกว่า
- การเคลื่อนที่ของข้อเท้า: การเดินและวิ่งเริ่มต้นด้วยส้นเท้าสัมผัสพื้น การสปรินต์เริ่มต้นด้วยปลายเท้าสัมผัสพื้น ในการวิ่งและสปรินต์ ข้อเท้าจะกระดกขึ้น (dorsiflex) ในช่วงการดูดซับ ในขณะที่การเดินข้อเท้าจะกระดกลง (plantarflex)
- ความแตกต่างในนักสปรินต์ชั้นนำ: นักสปรินต์ชั้นนำจะมีการดูดซับแรงกระแทกที่หัวเข่าน้อยมาก เนื่องจากแรงส่วนใหญ่ถูกดูดซับโดยกล้ามเนื้อน่อง (ankle plantarflexors) และกล้ามเนื้อสะโพก (hip abductors)
เมื่อความเร็วเพิ่มขึ้น:
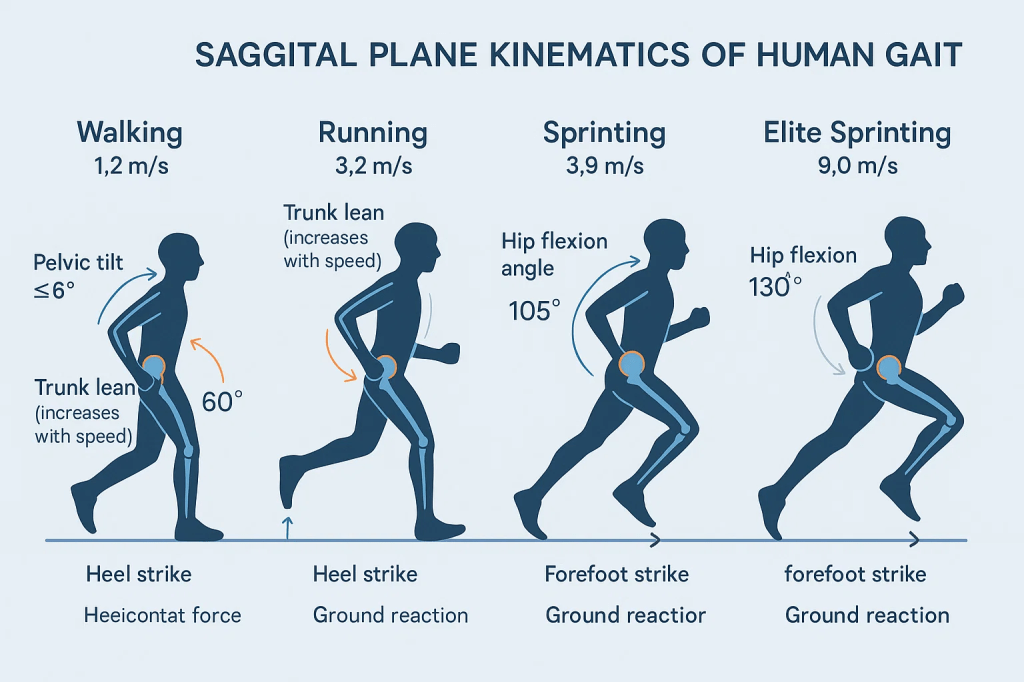
จลนศาสตร์ระนาบซาจิททอลของการเดินและวิ่งในมนุษย์
อินโฟกราฟิกนี้แสดงให้เห็นการเปลี่ยนแปลงของลักษณะการเคลื่อนไหวเมื่อความเร็วเพิ่มขึ้น จากการเดิน (1.2 m/s) ไปจนถึงการวิ่งเร็วระดับนักกีฬา (9.0 m/s)
🔹 การเอียงเชิงกราน (Pelvic tilt) และ การเอียงลำตัวไปข้างหน้า (Trunk lean) เพิ่มขึ้นตามความเร็ว เพื่อช่วยให้ศูนย์ถ่วงลดต่ำลงและส่งแรงไปข้างหน้าได้ดีขึ้น
🔹 การงอสะโพก (Hip flexion angle) สูงขึ้นเรื่อย ๆ จาก 60° ไปจนถึง 130° ส่งผลให้ช่วงก้าวยาวขึ้น
🔹 จุดสัมผัสเท้าแรก (Foot strike) เปลี่ยนจากการลงส้นเท้า (Heel strike) ไปเป็นการลงปลายเท้า (Forefoot strike) เพื่อรองรับความเร็วที่สูงขึ้น
🔹 แรงปฏิกิริยาจากพื้น (Ground reaction force) เปลี่ยนทิศทางให้เหมาะสมกับการเร่งความเร็ว
การเปลี่ยนแปลงเหล่านี้ช่วยเพิ่มประสิทธิภาพของการเคลื่อนไหวโดยไม่สูญเสียพลังงานมากเกินไป
4.2 แนวระนาบ Coronal (ด้านข้าง):
- การเคลื่อนที่ของสะโพกและเชิงกราน: การเคลื่อนที่ในแนวระนาบนี้มีน้อยกว่า แต่มีความสำคัญในการรักษาสมดุลของร่างกายส่วนบน “สะโพกจะหุบเข้าหาลำตัวในขณะที่เท้าเหยียบพื้นและกางออกในขณะเหวี่ยงขา” การเคลื่อนที่ของสะโพกนี้สะท้อนการเคลื่อนที่ของเชิงกราน ซึ่งช่วยลดการเคลื่อนไหวของหัวไหล่และศีรษะ
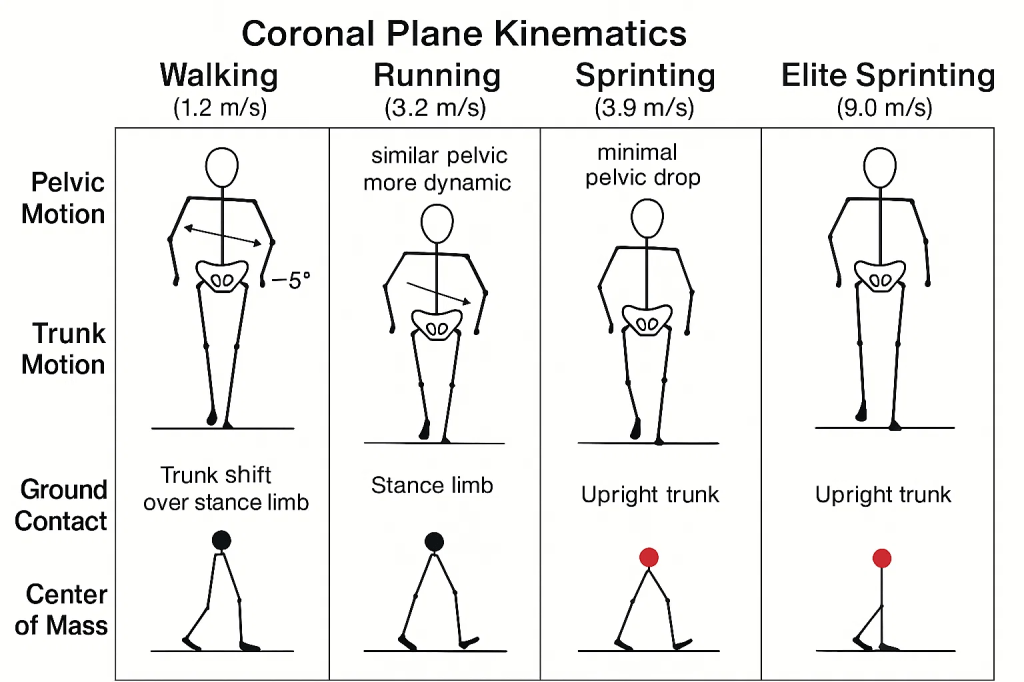
เมื่อเปลี่ยนจากการเดินไปสู่วิ่งและสปรินต์ การเคลื่อนไหวของกระดูกเชิงกรานและลำตัวมีลักษณะเปลี่ยนแปลงดังนี้:
- การเดิน (1.2 m/s): กระดูกเชิงกรานเอียงลงด้านหนึ่งประมาณ 5° ขณะลงน้ำหนัก ลำตัวเอนเข้าหาขาข้างที่ลงน้ำหนัก (stance limb) เพื่อรักษาสมดุล จุดศูนย์ถ่วง (Center of Mass) เคลื่อนตัวตาม
- การวิ่ง (3.2 m/s): การเอียงของกระดูกเชิงกรานยังคงอยู่แต่มีความเคลื่อนไหวมากขึ้น ลำตัวยังคงเอนเข้าหาขาข้างที่ลงน้ำหนักเล็กน้อย
- การสปรินต์ (3.9 m/s): การเอียงของกระดูกเชิงกรานน้อยลงอย่างชัดเจน ลำตัวตั้งตรงมากขึ้นเพื่อรองรับแรงส่ง
- นักสปรินต์ระดับโลก (9.0 m/s): ลำตัวตั้งตรงและกระดูกเชิงกรานคงที่ จุดศูนย์ถ่วงอยู่ในตำแหน่งเหมาะสมเพื่อการส่งแรงในแนวนอนอย่างมีประสิทธิภาพ
- 4.3 แนวระนาบ Transverse (บิด):
- การหมุนของเชิงกราน: ในการเดิน การหมุนของเชิงกรานมีความสำคัญต่อการเพิ่มความยาวก้าว ในการวิ่งและการสปรินต์ การหมุนเชิงกรานภายในสูงสุดเกิดขึ้นในช่วงกลาง swing เพื่อยืดก้าว แต่เมื่อเท้าสัมผัสพื้น เชิงกรานจะหมุนออกด้านนอกเพื่อเพิ่มแรงผลักในแนวนอน
- การทำงานของเท้า (Pronation/Supination): Pronation (การพลิกเท้าเข้าด้านใน) เกิดขึ้นในช่วงการดูดซับแรง ในขณะที่ Supination (การพลิกเท้าออกด้านนอก) เกิดขึ้นในช่วงการสร้างแรง เพื่อให้เท้าเป็นคานที่มั่นคงสำหรับการผลักตัวขึ้น
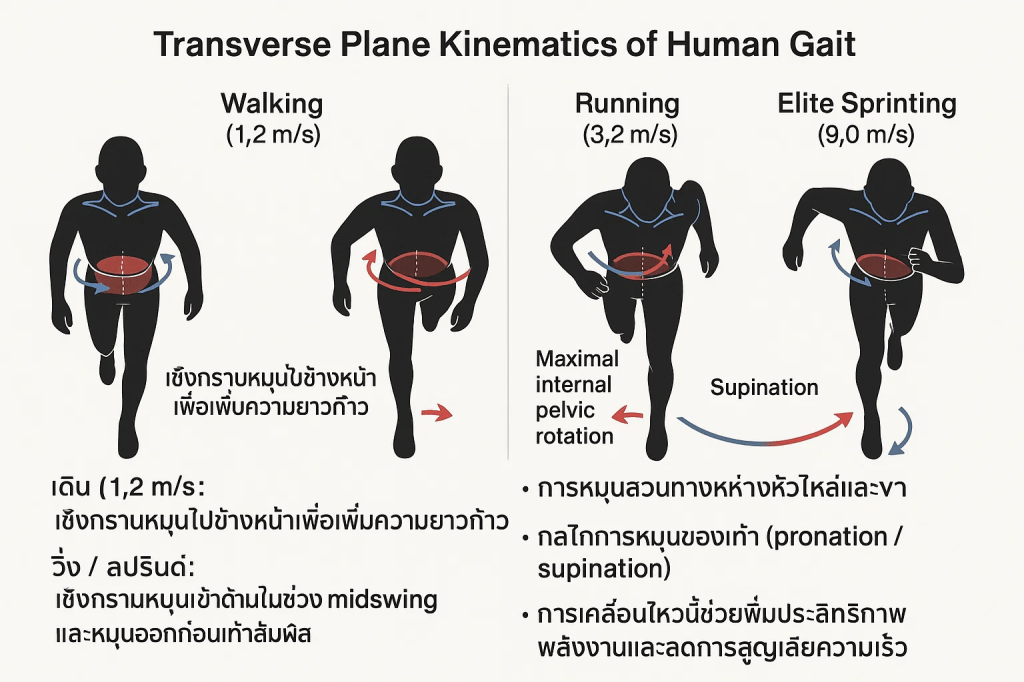
การเคลื่อนไหวในระนาบทรานสเวิร์ส (Transverse Plane) ของการเดินและวิ่ง
ระนาบทรานสเวิร์สแสดงให้เห็นถึงการหมุนของเชิงกรานและการหมุนของหัวไหล่ในทิศทางตรงกันข้าม เพื่อเพิ่มความสมดุลและประสิทธิภาพของการเคลื่อนไหวในแต่ละก้าว
- 🏃♂️ การเดิน (1.2 m/s): เชิงกรานหมุนไปข้างหน้า เพื่อช่วยเพิ่มความยาวก้าว
- 🏃♂️ การวิ่ง/สปรินต์ (3.2–9.0 m/s): เชิงกรานหมุนเข้าด้านในช่วง midswing และหมุนออกก่อนที่เท้าจะสัมผัสพื้น ช่วยเพิ่มแรงส่งและลดการสูญเสียพลังงาน
- 🔁 การหมุนสวนทางของหัวไหล่และเชิงกราน: ช่วยรักษาสมดุลของร่างกายขณะเคลื่อนไหวเร็ว
- 🦶 กลไกการหมุนของเท้า (Pronation/Supination): มีบทบาทสำคัญในการดูดซับแรงกระแทกและส่งแรงกลับขณะวิ่ง
ภาพนี้สรุปการเปลี่ยนแปลงของการหมุนในระนาบทรานสเวิร์สตามระดับความเร็วของการเคลื่อนไหว ตั้งแต่การเดินจนถึงการวิ่งเร็วระดับนักกีฬา
5. จลนพลศาสตร์ (Kinetics)
จลนพลศาสตร์ศึกษาแรงที่ทำให้เกิดการเคลื่อนไหว
- เป้าหมายหลักในการเคลื่อนไหวของนักกีฬา:การดูดซับแรงกระแทกและการควบคุมการยุบตัวในแนวดิ่ง
- การทรงตัวและการควบคุมท่าทางของร่างกายส่วนบน
- การสร้างพลังงานสำหรับการผลักดันไปข้างหน้าและขึ้นบน
- การควบคุมการเปลี่ยนแปลงทิศทางของศูนย์กลางมวลของร่างกาย
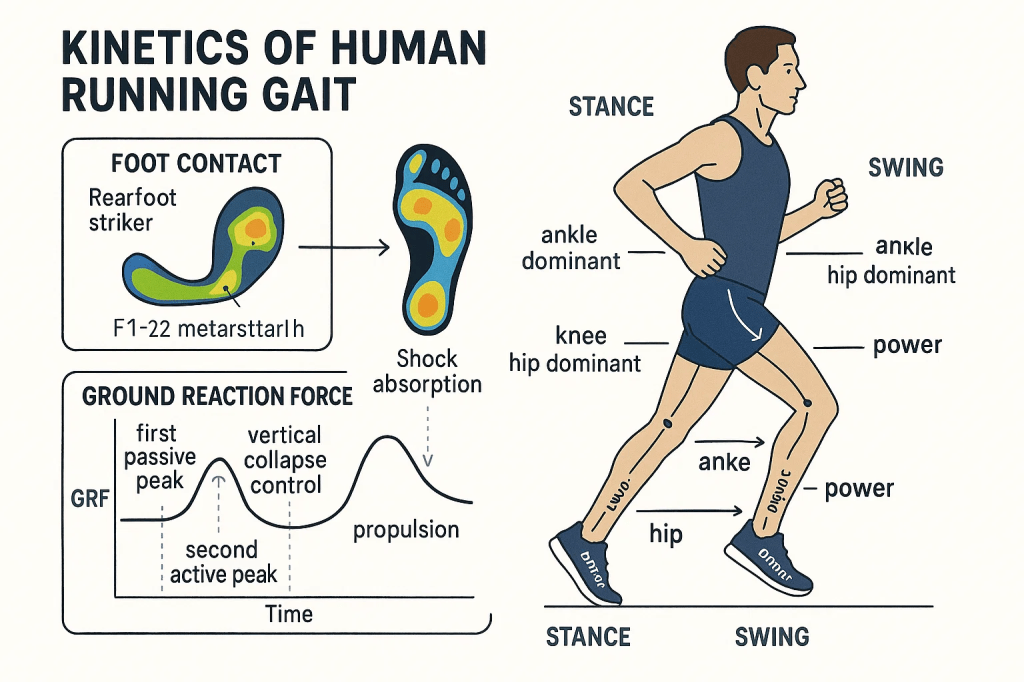
จลพิกัดแรงในจังหวะวิ่ง (Kinetics of Human Running Gait)
ภาพนี้แสดงให้เห็นถึงรูปแบบการสัมผัสเท้ากับพื้น (rearfoot strike) การทำงานของแรงปฏิกิริยาจากพื้น (Ground Reaction Force) และบทบาทของกล้ามเนื้อแต่ละส่วนในช่วง stance และ swing ของรอบการวิ่ง
- ⚡️ Foot Contact: เริ่มต้นด้วยส้นเท้าสัมผัสพื้น (rearfoot striker) แรงจะส่งผ่านจากส้นขึ้นไปยังส่วนอื่นของเท้า
- 📈 Ground Reaction Force (GRF): แสดงกราฟแรงที่มีจุดพีคสองจุด — จุดแรกเป็นแรงพาสซีฟจากการลงน้ำหนัก และจุดที่สองคือแรงแอคทีฟในช่วงผลัก
- 🦶 ช่วง Stance: กล้ามเนื้อข้อเท้า (ankle) เป็นกล้ามเนื้อหลักในการควบคุมแรงกระแทก ส่วนหัวเข่าและสะโพกช่วยรองรับแรง
- 🦵 ช่วง Swing: กล้ามเนื้อสะโพกและข้อเท้าเป็นกล้ามเนื้อหลักในการยกขาและพาเท้ากลับมาเตรียมลงพื้นอีกครั้ง
- ศูนย์กลางความดัน (Center of Pressure – COP): โดยทั่วไปแรงกดจะเริ่มต้นที่ด้านข้างของส้นเท้า และเคลื่อนที่อย่างรวดเร็วไปยังด้านในของส้นเท้าและไปยังปลายเท้า
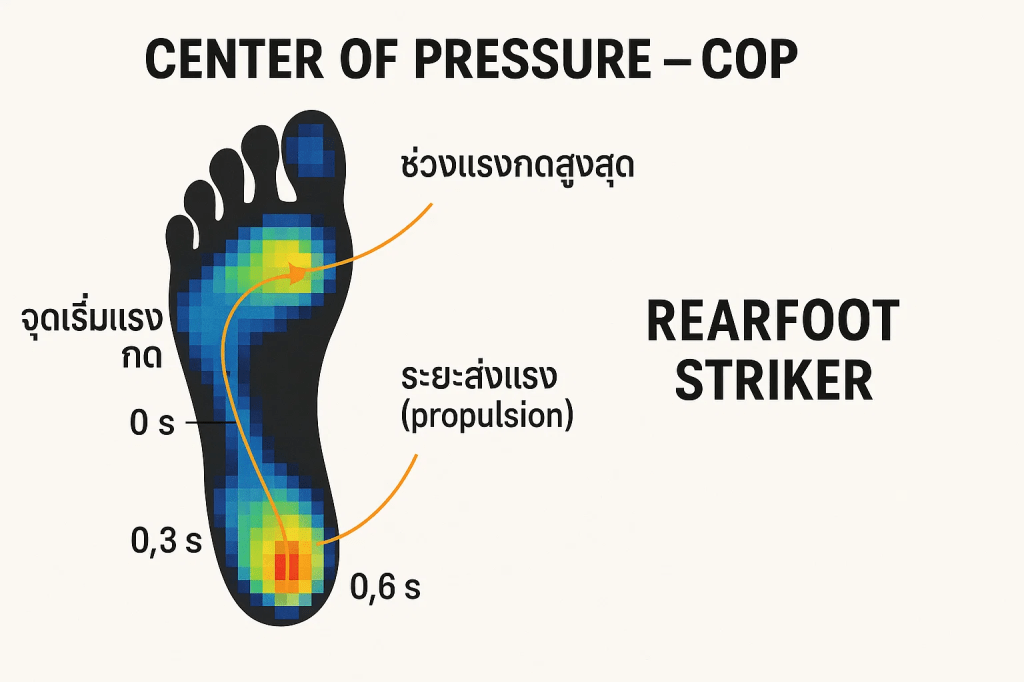
เส้นทางของจุดศูนย์กลางแรงกด (COP) ของนักวิ่งที่ลงเท้าด้านหลัง (Rearfoot Striker)
แสดงการกระจายแรงตั้งแต่จุดสัมผัสแรกบริเวณส้นเท้า ไปจนถึงการส่งแรงออกจากปลายเท้าในช่วง propulsion แรงกดเริ่มต้นที่ด้านนอกของส้นเท้า → เคลื่อนไปทางฝ่าเท้าด้านใน → สิ้นสุดที่โคนนิ้วหัวแม่เท้า ช่วงที่แรงกดสูงสุดจะอยู่ในระยะกลางของฝ่าเท้า ก่อนเข้าสู่การส่งแรงเต็มที่
การเข้าใจรูปแบบ COP นี้ช่วยในการวิเคราะห์ท่าวิ่ง ลดการบาดเจ็บ และปรับปรุงประสิทธิภาพการวิ่งโดยรวม
- ข้อมูลแรงปฏิกิริยาพื้นดิน (Ground Reaction Force – GRF): “ไม่มีรูปแบบการลงเท้าใดที่สามารถเป็นตัวแทนของนักวิ่งโดยทั่วไปได้” นักวิ่งที่ลงกลางเท้าโดยทั่วไปจะไม่มีแรงกระแทกในแนวดิ่งในตอนแรก
- ช่วงโมเมนต์และพลังงานข้อต่อในแนวระนาบ Sagittal (รูป จลนศาสตร์ระนาบซาจิททอล):ข้อเท้า: ในการวิ่ง โมเมนต์ที่ข้อเท้าคล้ายกับการเดิน แต่ในการสปรินต์ไม่มีโมเมนต์การกระดกข้อเท้าขึ้นในตอนแรก เพราะมีการสัมผัสพื้นด้วยปลายเท้าและตามด้วยการกระดกข้อเท้าขึ้นทันที พลังงานที่ถูกดูดซับที่ข้อเท้าในการสปรินต์สูงกว่าการวิ่ง
- หัวเข่า: โมเมนต์ที่หัวเข่าคล้ายกันในการวิ่งและการสปรินต์ หลังการสัมผัสพื้น quadriceps จะสร้างโมเมนต์การยืดเข่า ในการวิ่ง quadriceps จะหดตัวแบบยืดออก (eccentric) เพื่อดูดซับแรงกระแทก แต่ในการสปรินต์ กล้ามเนื้อน่อง (ankle plantarflexors) จะดูดซับแรงกระแทกส่วนใหญ่ ทำให้มีการดูดซับพลังงานที่หัวเข่าน้อยมาก
- สะโพก: โมเมนต์ที่สะโพกคล้ายกันในการเคลื่อนที่ไปข้างหน้าทุกรูปแบบ กล้ามเนื้อยืดสะโพกจะทำงานเด่นก่อนและหลังการสัมผัสพื้น ในขณะที่กล้ามเนื้องอสะโพกจะทำงานเด่นในช่วงครึ่งหลังของ stance ไปจนถึงครึ่งแรกของ swing กล้ามเนื้อทั้งสองกลุ่มนี้มีส่วนช่วยในการสร้างพลังงานที่เพิ่มขึ้นในการวิ่งและการสปรินต์

แรงปฏิกิริยาจากพื้น (GRF) ของนักวิ่งที่ลงส้นเท้า (Rearfoot Striker)
อินโฟกราฟิกแสดงรูปแบบแรงปฏิกิริยาจากพื้นระหว่างช่วงยืนถ่วงของการวิ่ง เริ่มจากจุดสัมผัสพื้น (Initial Contact) มียอดแรกของแรงเฉื่อยจากการกระแทก (Passive Peak) ตามด้วยการควบคุมการยุบตัวของร่างกาย และยอดที่สองของแรงจากกล้ามเนื้อในช่วงส่งแรง (Active Peak) แรงนี้มีความสำคัญในการรองรับแรงกระแทก ควบคุมเสถียรภาพ และผลักร่างกายไปข้างหน้า
การทำความเข้าใจแรงปฏิกิริยาพื้น (Ground Reaction Force – GRF) สำหรับการลงเท้าแบบปลายเท้า (forefoot strike) และความแตกต่างจากการลงเท้าแบบส้นเท้า (rearfoot strike) เป็นสิ่งสำคัญในการศึกษาชีวกลศาสตร์การวิ่ง
แรงปฏิกิริยาพื้น (Ground Reaction Force – GRF) จลนพลศาสตร์ (Kinetics) คือการศึกษาแรงที่ทำให้เกิดการเคลื่อนไหว และ GRF คือแรงที่เท้าและพื้นออกแรงกระทำต่อกันและกันในขนาดที่เท่ากันแต่ทิศทางตรงกันข้าม การวิเคราะห์แรงปฏิกิริยาพื้นสามารถช่วยให้เข้าใจกลไกการบาดเจ็บและกลยุทธ์การฝึกซ้อมได้
GRF สำหรับการลงเท้าแบบส้นเท้า (Rearfoot Strike)
• ลักษณะการลงเท้าเริ่มต้น: การลงเท้าแบบส้นเท้าเริ่มต้นด้วยส้นเท้าสัมผัสพื้น นักวิ่งระยะไกลประมาณ 80% เป็นผู้ลงเท้าแบบส้นเท้า
• รูปแบบแรงในแนวดิ่ง: ในผู้ลงเท้าแบบส้นเท้า แรงปฏิกิริยาพื้นในแนวดิ่ง (vertical component) จะแสดงออกมาเป็น ยอดแรงสองยอด:
1. ยอดแรงแรก (Passive Force Peak): เป็นแรงกระแทกแบบเฉื่อย (passive force) ที่เกิดขึ้นทันทีจากการสัมผัสพื้นด้วยส้นเท้า ยอดแรงนี้โดยทั่วไปจะมีขนาดเล็กกว่าและมีระยะเวลาสั้นกว่า แรงกระแทกนี้จะถูกลดทอนโดยแผ่นรองส้นเท้าและรองเท้า
2. ยอดแรงที่สอง (Active Force Peak): เป็นยอดแรงที่ใหญ่กว่าและเกิดจากแรงของกล้ามเนื้อที่ทำงานอยู่ (active muscle forces) ยอดแรงนี้จะเกิดขึ้นในช่วง 3/4 หลังของระยะเท้าเหยียบพื้น (stance phase) และสัมพันธ์กับการดูดซับแรงและการสร้างแรง (absorption and generation) ของศูนย์กลางมวลของร่างกาย ยอดแรงที่สองนี้มักจะใหญ่กว่าและมีระยะเวลานานกว่ายอดแรก
GRF สำหรับการลงเท้าแบบปลายเท้า (Forefoot Strike)
• ลักษณะการลงเท้าเริ่มต้น: การลงเท้าแบบปลายเท้าเกิดขึ้นเมื่อปลายเท้าสัมผัสพื้นก่อน โดยเฉพาะอย่างยิ่งนักสปรินต์ชั้นนำจะสัมผัสพื้นด้วยปลายเท้า และบางครั้งส้นเท้าอาจไม่สัมผัสพื้นเลย
• รูปแบบแรงในแนวดิ่ง: นักวิ่งที่ลงกลางเท้า (midfoot strikers) ซึ่งเป็นลักษณะที่ใกล้เคียงกับการลงเท้าแบบปลายเท้า โดยทั่วไปจะไม่มีแรงกระแทกในแนวดิ่งในตอนแรก ซึ่งหมายความว่าไม่มี “ยอดแรงแรก” ที่เกิดจากการกระแทกแบบเฉื่อยเหมือนในผู้ลงเท้าแบบส้นเท้า แรงหลักที่เกิดขึ้นในการลงเท้าแบบปลายเท้าจะมาจากการหดตัวของกล้ามเนื้อที่ออกแรงอย่างรุนแรงในช่วงกลางและปลายระยะเท้าเหยียบพื้น พลังงานรวมที่ถูกดูดซับที่ข้อเท้าจะสูงกว่าในการสปรินต์ (ซึ่งมักเป็นการลงปลายเท้า) เมื่อเทียบกับการวิ่ง (ซึ่งมักเป็นการลงส้นเท้า)

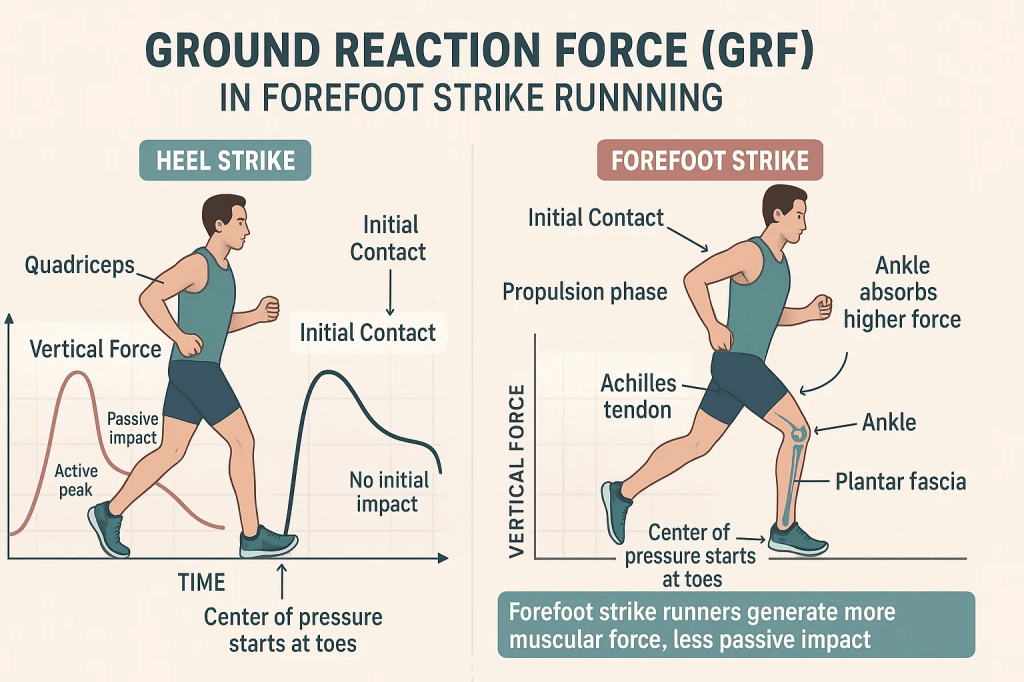
แรงปฏิกิริยาจากพื้น (GRF) ในการวิ่งลงเท้าแบบปลายเท้า (Forefoot Strike)
อินโฟกราฟิกนี้เปรียบเทียบรูปแบบแรงปฏิกิริยาในแนวดิ่ง (Vertical Ground Reaction Force) ระหว่างนักวิ่งที่ลงส้นเท้า (Heel Strike) และปลายเท้า (Forefoot Strike)
- ผู้ลงส้นเท้ามีแรงกระแทกเฉื่อยเริ่มต้น (Passive Impact Peak) ตามด้วยแรงจากกล้ามเนื้อ (Active Peak)
- ผู้ลงปลายเท้าไม่มีแรงกระแทกเฉื่อยเริ่มต้น แต่มีแรงกล้ามเนื้อสูงในช่วงส่งแรง
- แรงกระแทกดูดซับโดยข้อเท้า, เอ็นร้อยหวาย และพังผืดฝ่าเท้า
- การลงเท้าแบบปลายเท้าช่วยลดแรงกระแทกเริ่มต้น แต่เพิ่มแรงทำงานของกล้ามเนื้อ
ความแตกต่างหลักระหว่าง GRF ของการลงเท้าแบบปลายเท้าและส้นเท้า
1. จุดสัมผัสพื้นเริ่มต้น:
◦ ส้นเท้า: เริ่มต้นด้วยส้นเท้า
◦ ปลายเท้า: เริ่มต้นด้วยปลายเท้า
2. จำนวนยอดแรงในแนวดิ่ง:
◦ ส้นเท้า: มี สองยอดแรง คือ ยอดแรงแรกที่เกิดจากการกระแทกแบบเฉื่อย (passive impact peak) และยอดแรงที่สองที่เกิดจากแรงกล้ามเนื้อที่ทำงานอยู่ (active muscle force peak)
◦ ปลายเท้า (และกลางเท้า): โดยทั่วไป ไม่มี ยอดแรงกระแทกในแนวดิ่งในตอนแรก มีเพียงยอดแรงเดียวที่เกิดจากการทำงานของกล้ามเนื้อ
3. ลักษณะของยอดแรง:
◦ ส้นเท้า: มียอดแรงกระแทกเริ่มต้นที่เกิดจากแรงเฉื่อย ซึ่งมีขนาดเล็กกว่าและสั้นกว่า
◦ ปลายเท้า: ขาดแรงกระแทกเริ่มต้นแบบเฉื่อยนี้ แรงส่วนใหญ่ในการลงเท้าแบบปลายเท้าเกิดจากการหดตัวของกล้ามเนื้ออย่างรุนแรงในช่วงกลางและปลายระยะเท้าเหยียบพื้น
4. ความสัมพันธ์กับการบาดเจ็บ:
◦ ในอดีต เชื่อกันว่าการบาดเจ็บจากการวิ่งส่วนใหญ่เกิดจากแรงกระแทกสูงในขณะที่ส้นเท้าสัมผัสพื้น
◦ อย่างไรก็ตาม ปัจจุบันเป็นที่เข้าใจมากขึ้นว่าการบาดเจ็บเรื้อรังส่วนใหญ่จากการวิ่งเกี่ยวข้องกับ แรงที่สูงซึ่งเกิดขึ้นในช่วงกลางและปลายระยะเท้าเหยียบพื้น (active force phase) ซึ่งเกิดจากการหดตัวของกล้ามเนื้อที่ออกแรงอย่างรุนแรง ไม่ใช่จากการกระแทกเริ่มต้น เนื้อเยื่อหลายชนิด เช่น เอ็นร้อยหวาย พังผืดใต้ฝ่าเท้า และกล้ามเนื้อ quadriceps จะดูดซับแรงเหล่านี้ในช่วงครึ่งแรกของระยะยืน
ความเชื่อในอดีตเกี่ยวกับสาเหตุการบาดเจ็บ ในอดีต มีความเชื่อกันอย่างแพร่หลายว่าการบาดเจ็บจากการวิ่งส่วนใหญ่เกิดจาก แรงกระแทกสูงในขณะที่ส้นเท้าสัมผัสพื้น (heelstrike) ซึ่งทำให้เกิดการวิจัยจำนวนมากมุ่งเน้นไปที่รองเท้าและพื้นผิวการวิ่งว่าปัจจัยเหล่านี้เปลี่ยนแปลงแรงกระแทกจากการลงส้นเท้าอย่างไร
• ความเข้าใจปัจจุบัน: แรงจากกล้ามเนื้อที่ทำงานอยู่เป็นปัจจัยสำคัญ
◦ ในปัจจุบัน เป็นที่เข้าใจมากขึ้นว่า แรงเฉื่อยที่เกี่ยวข้องกับการสัมผัสพื้นในตอนแรกนั้นมีขนาดเล็กกว่าและมีระยะเวลาสั้นกว่า เมื่อเทียบกับระยะแรงที่ออกฤทธิ์ที่ใหญ่กว่าซึ่งเกิดขึ้นใน 3/4 หลังของระยะเท้าเหยียบพื้น (stance phase)
◦ ดูเหมือนว่า การบาดเจ็บเรื้อรังส่วนใหญ่จากการวิ่งจ็อกกิ้งนั้นเกี่ยวข้องกับแรงที่สูงซึ่งเกิดขึ้นในช่วงกลางและปลายของการลงน้ำหนัก แรงเหล่านี้ไม่ได้เกิดจากการกระแทกเริ่มต้นกับพื้น แต่เกิดจากการหดตัวของกล้ามเนื้อที่ออกแรงอย่างรุนแรง ตัวอย่างเช่น แรงสูงสุดของเอ็นร้อยหวายคาดว่าจะอยู่ในช่วง 6-8 เท่าของน้ำหนักตัว ซึ่งเกิดจากการหดตัวอย่างรุนแรงของกล้ามเนื้อ gastrosoleus
◦ เนื้อเยื่อหลายชนิดที่ทำหน้าที่ดูดซับแรงในครึ่งแรกของระยะยืน ซึ่งมักเป็นบริเวณที่บาดเจ็บพบบ่อยในนักวิ่งระยะไกล ได้แก่ เอ็นร้อยหวาย, พังผืดใต้ฝ่าเท้า, กลไก Quadriceps และกล้ามเนื้อสะโพกที่กางออก (Hip abductors) การบาดเจ็บเหล่านี้จึงสัมพันธ์กับแรงจากกล้ามเนื้อที่ทำงานอยู่ในช่วงกลางระยะยืน ไม่ใช่จากแรงกระแทกแบบเฉยๆ ณ เวลาสัมผัสพื้นเริ่มต้น
• ความแตกต่างของ Ground Reaction Force (GRF) ในการลงเท้าแต่ละแบบ
◦ การลงเท้าแบบส้นเท้า (Rearfoot Strike) นักวิ่งที่ลงส้นเท้าจะแสดง ยอดแรงในแนวดิ่งสองยอด:
1. ยอดแรงแรก (Passive Force Peak): เป็นแรงกระแทกแบบเฉื่อยที่เกิดขึ้นทันทีจากการสัมผัสพื้นด้วยส้นเท้า ยอดแรงนี้มักมีขนาดเล็กกว่าและระยะเวลาสั้นกว่า
2. ยอดแรงที่สอง (Active Force Peak): เป็นยอดแรงที่ใหญ่กว่าและเกิดจากแรงของกล้ามเนื้อที่ทำงานอยู่ ยอดแรงนี้จะเกิดขึ้นในช่วง 3/4 หลังของระยะเท้าเหยียบพื้น
◦ การลงเท้าแบบปลายเท้า (Forefoot Strike) นักวิ่งที่ลงกลางเท้า (ซึ่งใกล้เคียงกับการลงปลายเท้า) โดยทั่วไป จะไม่มีแรงกระแทกในแนวดิ่งในตอนแรก ซึ่งหมายความว่าไม่มี “ยอดแรงแรก” ที่เกิดจากการกระแทกแบบเฉื่อยเหมือนในการลงเท้าแบบส้นเท้า แรงหลักที่เกิดขึ้นในการลงเท้าแบบปลายเท้าจะมาจากการหดตัวของกล้ามเนื้อที่ออกแรงอย่างรุนแรงในช่วงกลางและปลายระยะเท้าเหยียบพื้น
การบาดเจ็บกับการลงเท้าแต่ละแบบ:
แม้ว่าการลงเท้าแบบปลายเท้าจะไม่มี “ยอดแรงกระแทกเริ่มต้น” เหมือนกับการลงเท้าแบบส้นเท้า แต่แหล่งข้อมูลชี้ให้เห็นว่าการบาดเจ็บเรื้อรังส่วนใหญ่ไม่ได้เกิดจากแรงกระแทกเริ่มต้น แต่เกิดจาก แรงที่สูงขึ้นในช่วงกลางและปลายของระยะยืนที่เกิดจากการหดตัวของกล้ามเนื้อที่ออกแรงอย่างรุนแรง ซึ่งเป็นส่วนที่เกิดขึ้นทั้งในการลงเท้าแบบส้นเท้าและปลายเท้า ดังนั้น แหล่งข้อมูลไม่ได้ให้หลักฐานโดยตรงว่าการลงเท้าแบบปลายเท้าช่วยลดอัตราการบาดเจ็บโดยรวมเมื่อเทียบกับการลงเท้าแบบส้นเท้า แต่เปลี่ยนมุมมองของกลไกการบาดเจ็บไปที่ระยะแรงจากกล้ามเนื้อที่กระตือรือร้นเป็นหลัก。
- แหล่งกำเนิดพลังงานสำหรับการผลักดันไปข้างหน้า (รูปที่ 10):กล้ามเนื้อยืดสะโพกในช่วงครึ่งหลังของ swing และครึ่งแรกของ stance
- กล้ามเนื้องอสะโพกหลังจากยกเท้าพ้นพื้น
- กล้ามเนื้อยืดหัวเข่า, กล้ามเนื้อกางสะโพก, และกล้ามเนื้อน่องในช่วงการสร้างแรงของ stance phase
- การเปลี่ยนแปลงกลยุทธ์การเคลื่อนที่ตามความเร็ว: “กลยุทธ์การเคลื่อนที่เปลี่ยนไปเมื่อเพิ่มความเร็ว” เมื่อความเร็วเพิ่มขึ้น กล้ามเนื้อส่วนต้นของร่างกายจะสร้างพลังงานได้มากขึ้น
- บทบาทของเส้นเอ็น (Tendons): เส้นเอ็นยืดออกและหดตัวกลับอย่างมีประสิทธิภาพเพื่อส่งคืนพลังงานที่เก็บไว้ กล้ามเนื้อทำหน้าที่เป็นตัวควบคุมความตึงของเส้นเอ็น
- บทบาทของแขน: แขนช่วยรักษาสมดุลและคงความเร็วในแนวนอนให้คงที่ โดยทำหน้าที่เป็นตัวถ่วงน้ำหนักสำหรับการหมุนของร่างกายส่วนล่าง
- บทสรุปจาก Kinetics: กลยุทธ์การเคลื่อนไหวจะเปลี่ยนไปตามความเร็วที่เพิ่มขึ้น แหล่งกำเนิดพลังงานหลักมาจากการเหยียดสะโพก (จาก hamstrings และ gluteus maximus), การงอสะโพก (จาก psoas), และการเหยียดเข่า/งอข้อเท้า (จาก quadriceps และ gastrosoleus) “ปริมาณพลังงานทั้งหมดที่สร้างขึ้นจะเพิ่มขึ้นตามความเร็วที่เพิ่มขึ้น และสัดส่วนการมีส่วนร่วมของกล้ามเนื้อแต่ละกลุ่มจะเปลี่ยนไป โดยมีการสร้างพลังงานที่ส่วนต้นของร่างกายมากขึ้นเมื่อความเร็วเพิ่มขึ้น” [Section 5.5] เอ็น (tendons) ทำหน้าที่เป็นสปริงที่เก็บและคืนพลังงานได้อย่างมีประสิทธิภาพ
6. พลังงานศักย์และพลังงานจลน์
- ความแตกต่างที่สำคัญ: ความสัมพันธ์ระหว่างพลังงานศักย์และพลังงานจลน์แตกต่างกันอย่างมากระหว่างการเดินและการวิ่ง “ในการเดิน ทั้งสองจะไม่อยู่ในเฟสเดียวกัน เมื่อพลังงานศักย์สูง พลังงานจลน์จะต่ำ และในทางกลับกัน … ในการวิ่ง ทั้งสองจะอยู่ในเฟสเดียวกัน” [Fig. 11]
- การเดิน: เปรียบได้กับการร่วงหล่นที่ควบคุมได้ (pendulum-like motion) ประสิทธิภาพถูกรักษาไว้โดยการแลกเปลี่ยนพลังงานศักย์และพลังงานจลน์อย่างมีประสิทธิภาพ
- การวิ่ง: เปรียบได้กับบุคคลที่อยู่บนไม้โผน (pogo stick) ประสิทธิภาพถูกรักษาไว้เป็นหลักโดย:
- การเก็บและคืนพลังงานศักย์ยืดหยุ่นโดยโครงสร้างยืดหยุ่น (โดยเฉพาะเอ็น)
- การถ่ายโอนพลังงานจากส่วนหนึ่งของร่างกายไปยังอีกส่วนหนึ่งโดยกล้ามเนื้อสองข้อต่อ (biarticular muscles) เช่น rectus femoris และ hamstrings
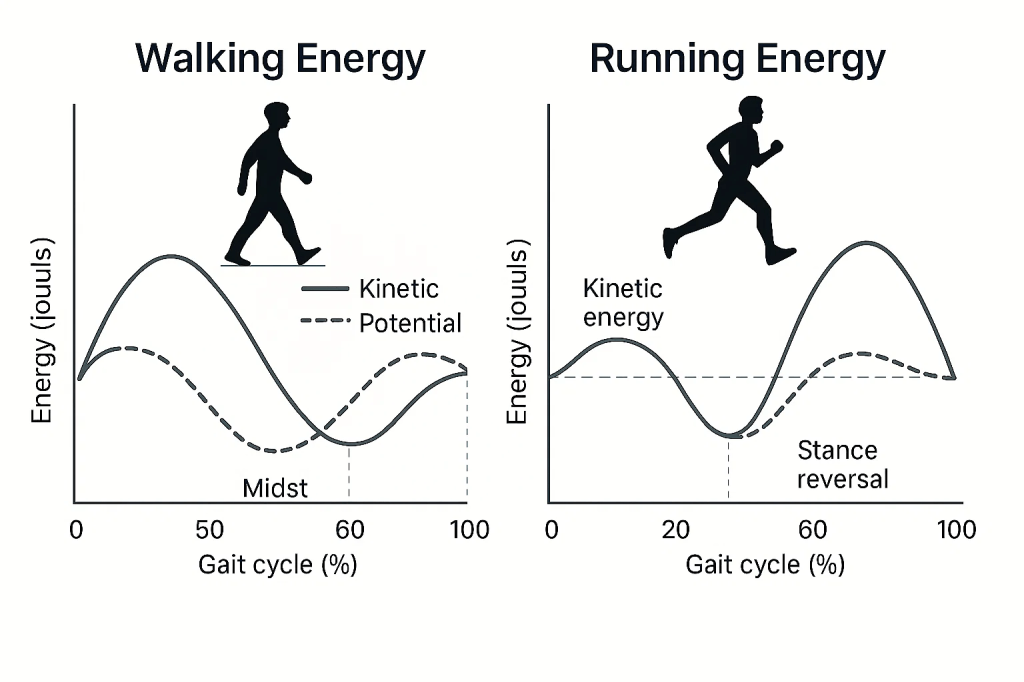
อินโฟกราฟิกนี้แสดงความแตกต่างของรูปแบบการเปลี่ยนแปลงพลังงานในร่างกายระหว่างการเดินและการวิ่ง:
- การเดิน พลังงานศักย์ (เส้นประ) และพลังงานจลน์ (เส้นทึบ) ทำงานสลับกัน (out of phase) กล่าวคือ เมื่อพลังงานศักย์สูง พลังงานจลน์จะต่ำ และในทางกลับกัน กลไกนี้ช่วยประหยัดพลังงานโดยอาศัยการเปลี่ยนพลังงานระหว่างรูปแบบศักย์และจลน์อย่างต่อเนื่อง
- การวิ่ง พลังงานศักย์และพลังงานจลน์จะขึ้น–ลงพร้อมกัน (in phase) ซึ่งแตกต่างจากการเดิน การที่พลังงานทั้งสองชนิดเพิ่มขึ้นพร้อมกันสะท้อนถึงการใช้พลังกล้ามเนื้ออย่างต่อเนื่องในระยะยืน (stance phase) และลดโอกาสในการถ่ายเทพลังงานระหว่างกัน
7. เอ็นในฐานะสปริง
- บทบาทของเอ็น: เอ็นทำหน้าที่เป็น “สปริงชีวภาพที่ยอดเยี่ยม” [Fig. 12] โดยดูดซับพลังงานจากการยืดออก (eccentric contraction) ก่อนที่จะหดสั้นลง (concentric contraction) เพื่อสร้างพลังงาน “ดังนั้น เราควรเริ่มคิดว่าเอ็นคือสปริง และกล้ามเนื้อคือตัวปรับแรงตึงของสปริง” [Section 7]
- การเก็บและคืนพลังงาน: เอ็น เช่น เอ็นร้อยหวาย สามารถเก็บพลังงานได้เมื่อยืดออกและคืนพลังงานนั้นกลับคืนมาได้อย่างมีประสิทธิภาพ (ประมาณ 95%) เพื่อช่วยในการผลักตัวออกไป การศึกษาพบว่าพลังงานส่วนใหญ่ที่ใช้ในการวิ่งถูกเก็บไว้ในเอ็นต่างๆ เช่น เอ็นร้อยหวายและเอ็นโค้งฝ่าเท้า [48]
- ความแข็งของขา: ระบบสปริงของร่างกายซึ่งประกอบด้วยกล้ามเนื้อ เอ็น และเอ็นยึดกระดูก ทำหน้าที่เหมือนสปริงเดียวที่เรียกว่า “leg spring” [49] การปรับตัวที่สำคัญที่สุดสำหรับการก้าวที่ถี่ขึ้นคือการที่สปริงขาแข็งขึ้น
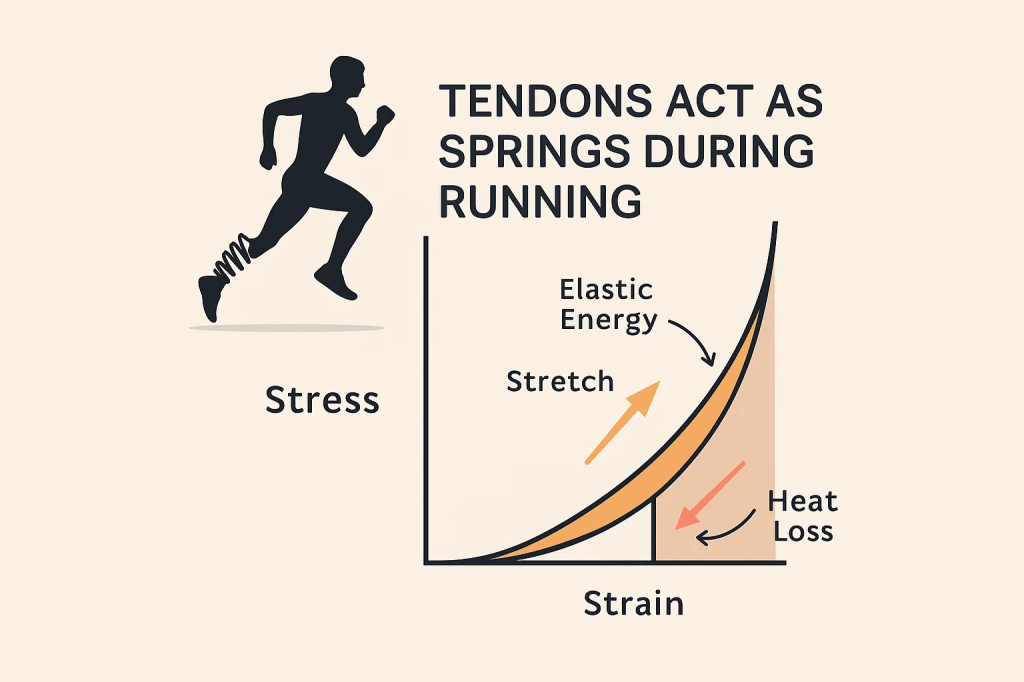
เอ็นกล้ามเนื้อทำหน้าที่เหมือนสปริงในขณะวิ่ง โดยจะกักเก็บพลังงานเมื่อถูกยืดออก และปล่อยกลับในรูปของแรงส่งต่อ ช่วยเพิ่มประสิทธิภาพในการวิ่ง โดยสูญเสียพลังงานบางส่วนในรูปของความร้อน
ลองจินตนาการว่า ขาของคุณเหมือนไม้กระโดด (pogo stick) ทุกครั้งที่เท้าสัมผัสพื้น เอ็นในร่างกายจะยืดตัวเพื่อเก็บพลังงานไว้เหมือนสปริง และเมื่อคุณดีดตัวออก เอ็นก็จะคืนพลังงานกลับมาเพื่อช่วยส่งคุณให้พุ่งไปข้างหน้า เหมือนกับสปริงที่ดี ยิ่งเก็บและคืนพลังได้ดี ก็ยิ่งกระโดดได้ไกลโดยใช้แรงน้อยลง นี่คือบทบาทของเอ็นร้อยหวายและพังผืดใต้ฝ่าเท้าในการวิ่ง
8. กล้ามเนื้อสองข้อต่อ (Biarticular Muscles)
- กลไกการถ่ายโอนพลังงาน: กล้ามเนื้อสองข้อต่อ เช่น hamstrings และ rectus femoris มีส่วนช่วยในการถ่ายโอนพลังงานระหว่างส่วนต่างๆ ของร่างกายเพื่อเพิ่มประสิทธิภาพการใช้พลังงาน
- ตัวอย่าง Hamstrings: ในช่วงครึ่งหลังของระยะเหวี่ยง hamstrings จะสร้างแรงบิดเหยียดที่สะโพกและแรงบิดงอที่เข่า ซึ่งตรงข้ามกับการเคลื่อนไหวของเข่า กล้ามเนื้อนี้ดูดซับพลังงานที่เข่าและสร้างพลังงานที่สะโพก แต่การเปลี่ยนแปลงความยาวโดยรวมของ hamstrings มีน้อย ทำให้กล้ามเนื้อโดยรวมไม่ดูดซับหรือสร้างพลังงาน “Hamstrings สามารถคิดได้ว่าทำหน้าที่เป็น ‘สายรัดพลังงาน’ โดยการควบคุมโมเมนตัมของส่วนร่างกายที่กำลังเคลื่อนที่และถ่ายโอนพลังงานนั้นไปยังข้อต่อถัดไปเพื่อช่วยในการเหยียดสะโพก”
- การถ่ายโอนพลังงานจากข้อต่อใกล้ส่วนกลางไปยังข้อต่อส่วนปลาย: กล้ามเนื้อขาแบบสองข้อต่อมีบทบาทสำคัญในการถ่ายโอนพลังงานกลจากข้อต่อส่วนต้นไปยังข้อต่อส่วนปลาย เพื่อช่วยให้เกิดการเปลี่ยนการเคลื่อนที่แบบหมุนของส่วนต่างๆ ของร่างกายไปเป็นการเคลื่อนที่แบบเลื่อนของศูนย์กลางมวลของร่างกายได้อย่างมีประสิทธิภาพ [50,51]
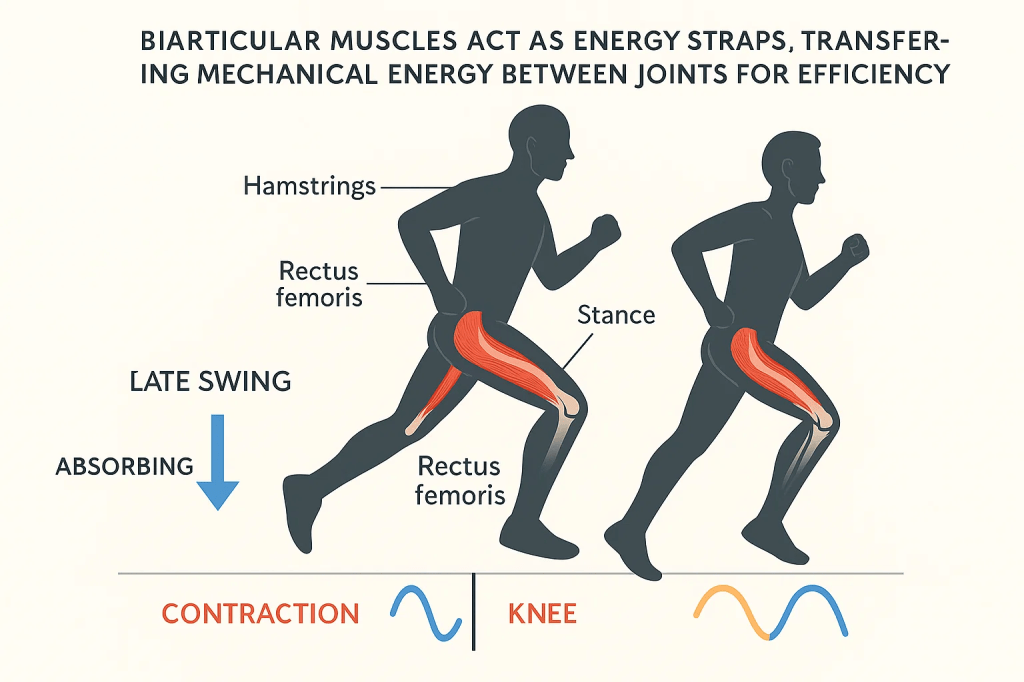
กล้ามเนื้อสองข้ออย่าง Hamstrings และ Rectus Femoris ทำหน้าที่เสมือน “สายพานพลังงาน” (Energy Straps) โดย:
- ช่วงปลายสวิง: กล้ามเนื้อ hamstrings และ rectus femoris ดูดซับพลังงาน ผ่านการหดตัวแบบยืดออก (eccentric contraction) เพื่อเตรียมขาสำหรับการลงพื้น
- ช่วงยืนเท้า (stance): กล้ามเนื้อ rectus femoris สร้างพลังงาน เพื่อส่งแรงผลักออกไปข้างหน้า
- กล้ามเนื้อเหล่านี้ช่วย ถ่ายโอนพลังงานกล (mechanical energy) ระหว่างข้อสะโพกและเข่า เพื่อให้เกิดการเคลื่อนไหวที่ประหยัดพลังงานและทรงประสิทธิภาพ
พลังงานกลเชิงกลถูกถ่ายโอนระหว่างข้อเข่าและสะโพก เพื่อเพิ่มประสิทธิภาพในการวิ่งและลดการสูญเสียพลังงาน
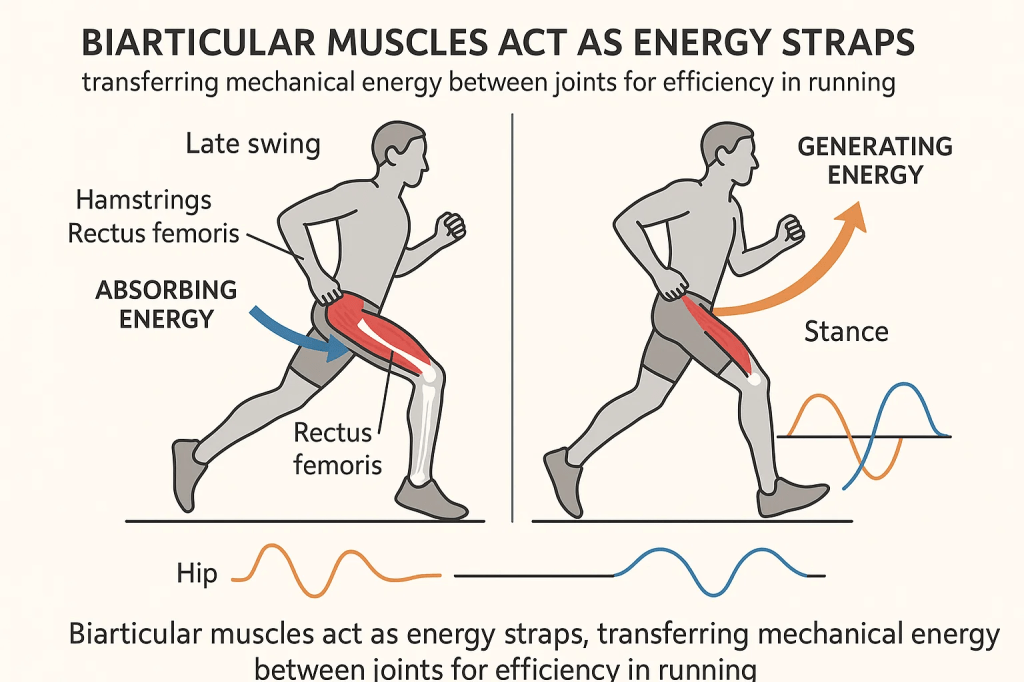
กล้ามเนื้อสองข้อต่อ (Biarticular muscles)
กล้ามเนื้อสองข้อต่อ (Biarticular muscles) เช่น hamstrings และ rectus femoris ทำหน้าที่เป็นสายพลังงาน ดูดซับพลังงานในช่วงเหวี่ยงขา และสร้างพลังงานในช่วงลงน้ำหนัก ช่วยให้การถ่ายโอนพลังงานระหว่างข้อต่อมีประสิทธิภาพมากขึ้นขณะวิ่ง
9. ประหยัดพลังงานในการเคลื่อนไหว (Economy of Motion)
- เป้าหมายหลัก: การเพิ่มประสิทธิภาพพลังงานสูงสุดเป็นปัจจัยกำหนดที่สำคัญที่สุดในการเคลื่อนที่ โดยเฉพาะในสภาวะแอโรบิกแบบคงที่
- การเดิน vs. การวิ่ง:การเดิน: แต่ละบุคคลเดินด้วยความเร็วที่ประหยัดพลังงานที่สุด โดยมีค่าใช้จ่ายพลังงานแอโรบิกน้อยที่สุดที่ประมาณ 1.3 m/s “เส้นโค้งความเร็ว-การใช้พลังงานเกือบแบนราบในช่วง 1.1 ถึง 1.4 m/s ทำให้เกิดความแปรผันของความเร็วในการเดินได้ประมาณ 9–15% โดยไม่กระทบต่อประสิทธิภาพ” [Fig. 14]
- การวิ่ง: ค่าใช้จ่ายออกซิเจนเปลี่ยนแปลงน้อยมากในช่วงความเร็วการวิ่งที่หลากหลาย ประสิทธิภาพในการเคลื่อนที่ถูกรักษาไว้ด้วยกลไกที่ยังไม่ชัดเจน ซึ่งอาจรวมถึงการเลือกความยาวก้าว/จังหวะก้าว [54] ความเร็วในการหดตัวของกล้ามเนื้อ [55] และแหล่งที่มาของการออกแรงทางกล [56]
- ปัจจัยที่มีผลต่อประสิทธิภาพ: Kram และ Taylor [57] สรุปว่าเศรษฐศาสตร์ของการวิ่งเกี่ยวข้องน้อยกับงานที่ทำต่อสิ่งแวดล้อม แต่เกี่ยวข้องโดยตรงกับงานที่ทำโดยกล้ามเนื้อและเอ็นเพื่อยกและเร่งความเร็วร่างกาย และมีความสัมพันธ์ผกผันกับอัตราก้าว (คือ ยิ่งใช้เวลาน้อยในการออกแรง ค่าใช้จ่ายพลังงานยิ่งสูง)
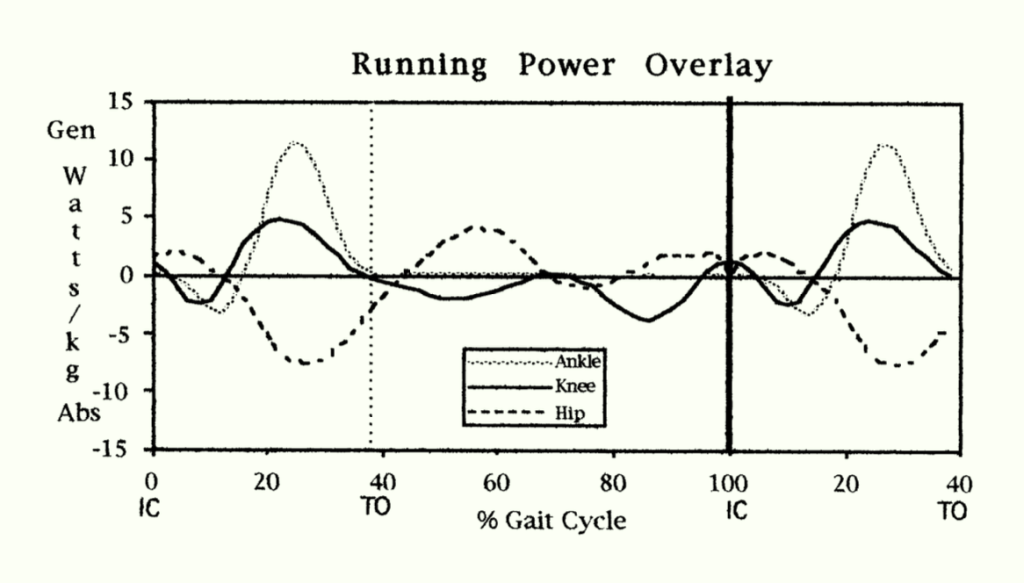
กราฟแสดงการดูดซับพลังงาน (Absorbed Power) และการสร้างพลังงาน (Generated Power) ที่ข้อสะโพก ข้อเข่า และข้อเท้า ระหว่างวัฏจักรการวิ่ง (Gait Cycle)
กล้ามเนื้อแบบสองข้อต่อ (Biarticular muscles) เช่น rectus femoris และ hamstrings มีบทบาทสำคัญในการถ่ายโอนพลังงานเชิงกลระหว่างข้อต่อสะโพกและเข่า ซึ่งช่วยเพิ่มประสิทธิภาพการเคลื่อนไหว โดยเมื่อข้อหนึ่งดูดซับพลังงาน ข้ออื่นจะสร้างพลังงานในช่วงเวลาเดียวกัน

ประสิทธิภาพการใช้พลังงานในการเดินและวิ่ง
กราฟประสิทธิภาพการใช้พลังงานในการเดินและวิ่ง
กราฟนี้แสดงความสัมพันธ์ระหว่างต้นทุนพลังงาน (จูลต่อเมตร) กับความเร็ว
- การเดินมีลักษณะโค้งรูปตัว U กลับหัว โดยใช้พลังงานน้อยที่สุดที่ความเร็วประมาณ 1.3 เมตร/วินาที
- หากเดินเร็วกว่า 3 เมตร/วินาที จะใช้พลังงานมากขึ้นอย่างไม่คุ้มค่า
- การวิ่งกลับใช้พลังงานคงที่ในช่วงความเร็วที่หลากหลาย จึงเป็นเหตุผลที่ทำให้การเปลี่ยนจากการเดินเป็นการวิ่งในความเร็วสูง ช่วยเพิ่มประสิทธิภาพได้
10. ชีวกลศาสตร์ของเท้า
- การหมุนของเท้า: การหมุนของเท้า (pronation/supination) เกิดขึ้นในระนาบเฉียงและสำคัญต่อการดูดซับแรงกระแทกและการผลักตัวออกไป “Pronation ‘ปลดล็อก’ ข้อต่อกระดูกข้อเท้าด้านข้าง ทำให้เท้ามีความยืดหยุ่นมากขึ้น ซึ่งช่วยให้เท้าทำหน้าที่เป็นตัวดูดซับแรงกระแทกได้อย่างมีประสิทธิภาพมากขึ้น”
- Pronation: เกิดขึ้นในระยะดูดซับเมื่อแขนขาถูกรับน้ำหนัก โดยปกติจะถึงจุดสูงสุดที่ 40% ของระยะยืน ทำให้เท้ามีความยืดหยุ่น
- Supination: เริ่มต้นหลังจากนั้นและเท้าจะกลับสู่ตำแหน่งเป็นกลางที่ 70% ของระยะยืน ทำให้เท้าแข็งแรงขึ้นเพื่อเป็นคานงัดสำหรับการผลักตัวออกไป
- Hyperpronation: ผู้ที่มีภาวะ hyperpronation อาจเริ่ม supinate ช้าหรือไปไม่ถึงตำแหน่งเป็นกลางจนกว่าจะผ่านช่วงการสร้างพลังงานไปแล้ว ซึ่งทำให้เท้าไม่มีประสิทธิภาพในการเป็นคานงัด
- ความท้าทายในการวัด: การวัดการเคลื่อนไหวของเท้าแบบ 3 มิติทำได้ยากและยังคงเป็นพื้นที่ที่ต้องการการปรับปรุงแบบจำลองชีวกลศาสตร์เพื่อความเข้าใจที่แม่นยำยิ่งขึ้น [62,63,64,65]
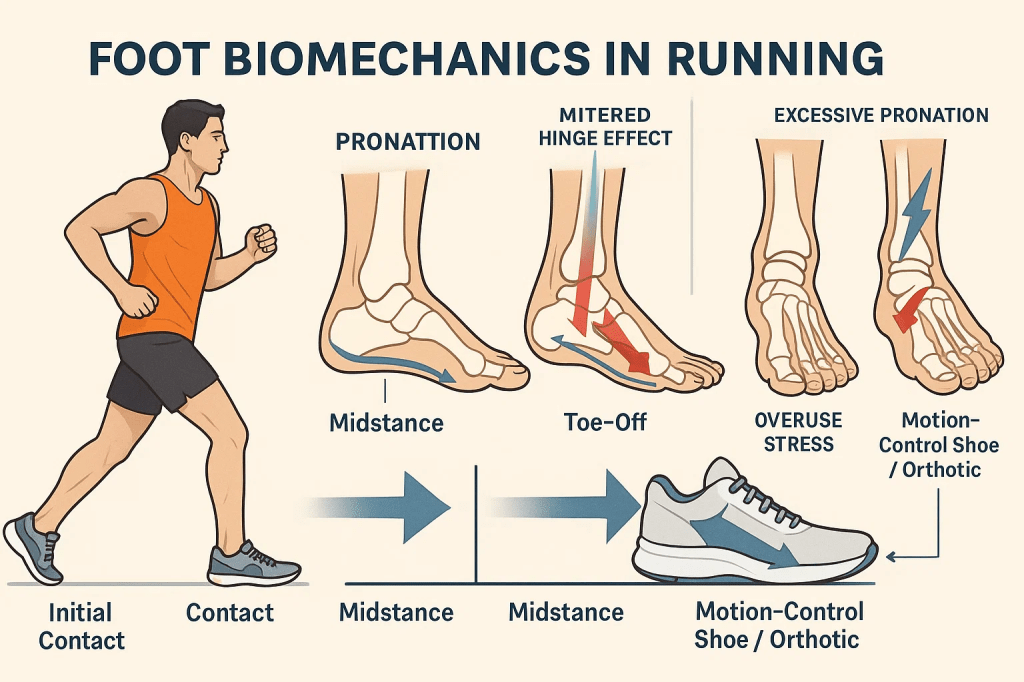
แสดงครบองค์ประกอบหลักในไบโอเมคานิกส์ของเท้าในการวิ่งได้อย่างชัดเจน ตั้งแต่ลำดับเฟสของการลงเท้า (Initial Contact → Midstance → Toe-Off) ไปจนถึงกลไก Mitered Hinge Effect, การหมุนของกระดูกแข้ง (Tibia Internal Rotation) และผลของ Excessive Pronation ที่นำไปสู่ความเครียดสะสม (Overuse Stress) รวมถึงแนวทางการแก้ไขด้วยรองเท้าควบคุมการเคลื่อนไหว (Motion-Control Shoe / Orthotic)
ไบโอเมคานิกส์ของเท้าในการวิ่ง: การเคลื่อนไหวของข้อเท้าจากช่วงเริ่มสัมผัสพื้นจนถึงการส่งแรง มีกลไกการหมุนของกระดูกแข้งที่สัมพันธ์กับการลงเท้าแบบพรอนเนชัน หากเกิดพรอนเนชันมากเกินไปอาจนำไปสู่ความเครียดสะสมเรื้อรัง โดยสามารถลดความเสี่ยงนี้ได้ด้วยการใช้รองเท้าควบคุมการเคลื่อนไหวหรือแผ่นรองเฉพาะบุคคล
11. รองเท้าวิ่ง
- บทบาทหลักของรองเท้า: Winter และ Bishop [26] ระบุว่ารองเท้าควรป้องกันหรือลดแรงที่อาจเป็นอันตรายได้ 3 วิธี:
- การดูดซับแรงกระแทก: ที่ส้นเท้าสัมผัสพื้น ลดแรงกระแทกเริ่มต้น
- ระยะยืน: ปกป้องจากพื้นผิวที่ขรุขระ
- การจัดแนวปลายเท้า: เพื่อให้การกระจายแรงสม่ำเสมอในบริเวณที่บาดเจ็บเรื้อรังหลัก
- ความขัดแย้งในการออกแบบ: รองเท้าที่ให้การรองรับแรงกระแทกและรองเท้าที่ให้การควบคุมการเคลื่อนไหวของเท้าต้องการคุณสมบัติการออกแบบที่ตรงกันข้าม ทำให้ไม่สามารถเพิ่มประสิทธิภาพทั้งสองด้านในรองเท้าคู่เดียวได้
- ข้อจำกัดของรองเท้า: แม้ว่าเทคโนโลยีรองเท้าจะก้าวหน้าขึ้น แต่อัตราการบาดเจ็บโดยรวมในนักวิ่งระยะไกลยังไม่เปลี่ยนแปลงอย่างมีนัยสำคัญ “สิ่งนี้ยืนยันแนวคิดที่ว่ารูปแบบการบาดเจ็บเรื้อรังเกิดจากปัจจัยอื่นนอกเหนือจากแรงที่เกิดจากการกระแทกเริ่มต้นและการจัดแนวเท้าในระยะยืน”
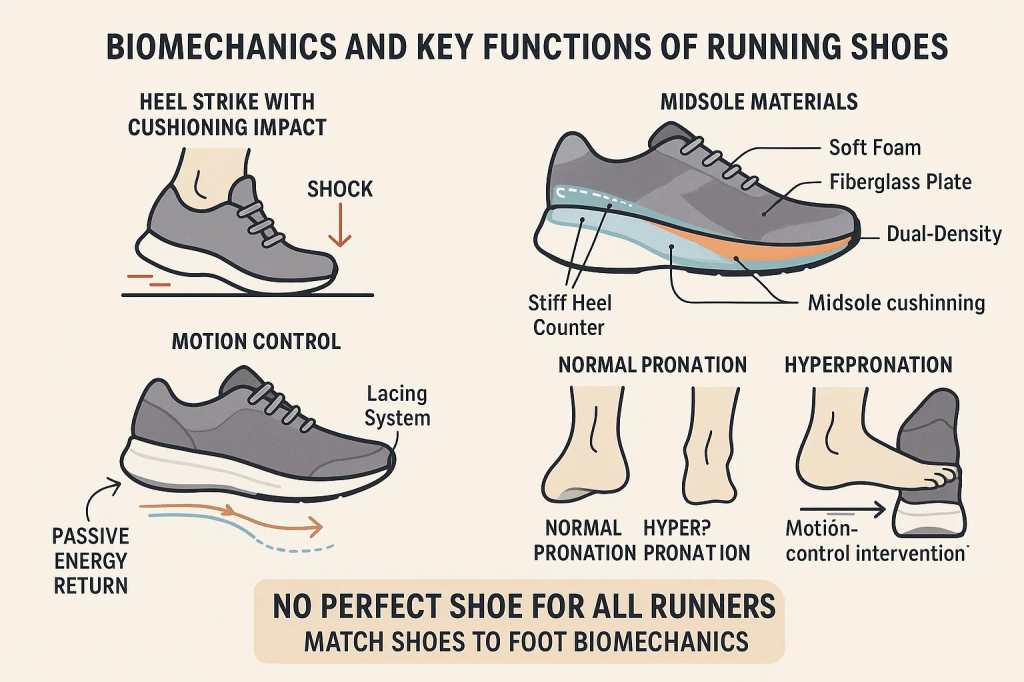
ภาพอินโฟกราฟิกแสดงบทบาทสำคัญของรองเท้าวิ่งต่อชีวกลศาสตร์ของเท้า
- แรงกระแทก: ขณะลงส้นเท้า แรงจะถูกดูดซับผ่านโฟมกลางพื้นรองเท้า
- โครงสร้างกลางพื้น (Midsole): ใช้วัสดุหลายชั้น เช่น โฟมชนิดนุ่ม แผ่นไฟเบอร์กลาส และโฟมแบบสองความหนาแน่น เพื่อให้ทั้งความนุ่มและแรงส่ง
- ควบคุมการเคลื่อนไหว (Motion Control): โครงสร้างส้นที่แข็งแรงและระบบผูกเชือกช่วยจำกัดการหมุนเท้าที่มากเกินไป
- ลักษณะเท้า: เท้าแบบปกติ (Normal Pronation) และเท้าแบบบิดมากเกินไป (Hyperpronation) ต้องการการรองรับที่แตกต่างกัน
- การส่งคืนพลังงานแบบพาสซีฟ: ช่วยประหยัดพลังงานจากการวิ่งโดยลดแรงที่ต้องใช้จากกล้ามเนื้อ
ไม่มีรองเท้าที่เหมาะกับนักวิ่งทุกคน — ควรเลือกรองเท้าให้เหมาะกับลักษณะเท้าและรูปแบบการวิ่ง
12. การบาดเจ็บจากการวิ่ง
แรงกระแทกไม่ใช่ผู้ร้ายตัวจริงเสมอไป
เดิมทีเราเชื่อว่าแรงกระแทกที่เกิดขึ้นตอนส้นเท้าสัมผัสพื้น (Passive Impact Forces) เป็นสาเหตุหลักของการบาดเจ็บ แต่ข้อมูลใหม่กลับพบว่า แรงเหล่านี้มีขนาดเล็กและระยะเวลาสั้นเกินกว่าจะสร้างปัญหาเรื้อรัง
ตัวการที่แท้จริงคือ Active Force (แรงที่กระตือรือร้น) — แรงที่กล้ามเนื้อสร้างขึ้นเองในช่วง 3/4 หลังของระยะยืน (Stance Phase) เพื่อผลักร่างกายให้เคลื่อนที่ไปข้างหน้า โดยเฉพาะการหดตัวอย่างรุนแรงของกล้ามเนื้อ เช่น:
- เอ็นร้อยหวาย (Achilles tendon) ที่รับแรงสูงถึง 6–8 เท่าของน้ำหนักตัว จากการทำงานของกล้ามเนื้อน่อง (Gastrosoleus)
- Quadriceps ที่ทำงานแบบยืดออก (eccentric contraction) เพื่อควบคุมการงอเข่า
- กล้ามเนื้อสะโพกกางออก (Hip Abductors) และ พังผืดใต้ฝ่าเท้า (Plantar Fascia) ซึ่งมักเป็นจุดบาดเจ็บซ้ำซากของนักวิ่งระยะไกล
ตัวอย่าง: Achilles Tendinopathy: เอ็นร้อยหวายยืดออกในช่วงครึ่งแรกของระยะยืนและหดตัวกลับมาอย่างมีประสิทธิภาพคล้ายสปริงเพื่อคืนพลังงาน [21] แรงสูงสุดที่เอ็นร้อยหวายไม่ได้เกิดขึ้นที่การสัมผัสพื้นเริ่มต้น แต่เกิดขึ้นที่กลางระยะยืน โดยเกิดจากการหดตัวของกล้ามเนื้อ gastrosoleus ที่มีพลัง “การบาดเจ็บเหล่านี้เกิดจากแรงกล้ามเนื้อที่กระตือรือร้นในช่วงกลางระยะยืน ไม่ใช่จากแรงกระแทกแบบเฉยๆ ณ เวลาสัมผัสพื้นเริ่มต้น”
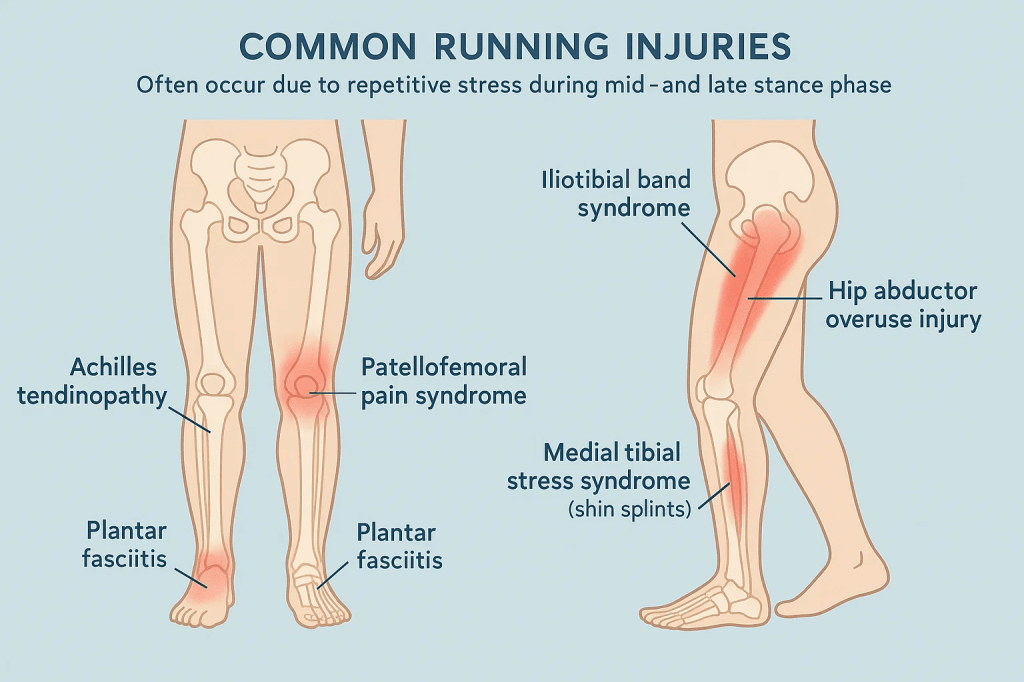
อาการบาดเจ็บจากการวิ่งที่พบบ่อย
อาการบาดเจ็บจากการวิ่งที่พบบ่อย
มักเกิดจากแรงกระแทนซ้ำ ๆ ในช่วงกึ่งกลางถึงปลายของระยะที่เท้าเหยียบพื้น (mid–late stance phase)
🔴 จุดบาดเจ็บและคำอธิบาย:
- เอ็นร้อยหวายอักเสบ (Achilles tendinopathy) – มักเกิดจากแรงกระแทกและความตึงของกล้ามเนื้อน่อง
- เจ็บใต้ฝ่าเท้า (พังผืดใต้ฝ่าเท้าอักเสบ) (Plantar fasciitis) – ปวดฝ่าเท้าหรือส้นเท้าจากแรงกดซ้ำที่ยาวนาน
- อาการเจ็บหน้าหัวเข่า (Patellofemoral pain syndrome) – เกิดจากความไม่สมดุลของแรงในข้อเข่า โดยเฉพาะเวลาวิ่งลงทางลาด
- อาการเจ็บสะโพกด้านนอก (Iliotibial band syndrome) – มักเกิดจากการเสียดสีระหว่าง IT band กับกระดูกเข่าด้านนอก
- อาการบาดเจ็บจากการใช้งานมากเกินที่กล้ามเนื้อสะโพกด้านข้าง (Hip abductor overuse injury) – อาการตึงและเจ็บบริเวณสะโพกด้านนอกจากการควบคุมท่าทางขณะวิ่ง
- อาการเจ็บหน้าแข้ง (Shin splints) (Medial tibial stress syndrome) – เกิดจากแรงกระแทกสะสมบริเวณกระดูกหน้าแข้งด้านใน
13. ทิศทางในอนาคต
🛠 แนวทางลดความเสี่ยงการบาดเจ็บ
13.1. เสริมความแข็งแรงให้กล้ามเนื้อที่ทำงานหนัก
- ฝึก eccentric ของ quadriceps และ concentric ของกล้ามเนื้อน่อง จะช่วยรองรับแรงในช่วง mid-to-late stance ได้ดีขึ้น
- เข้าใจการทำงานของเอ็นในฐานะ “สปริงชีวภาพ” ที่ต้องยืดก่อนหดซ้ำๆ ทุกก้าว นักวิ่งที่ไม่มีแรงต้านทานเพียงพอจะเสี่ยงบาดเจ็บจากการใช้งานเกิน (overuse injury)
13.2. เลือกรองเท้าอย่างเข้าใจ ไม่ใช่แค่แบรนด์หรือราคา
แม้เทคโนโลยีรองเท้าจะพัฒนาไปมาก แต่ยังไม่พบหลักฐานว่ารองเท้าช่วยลดอาการบาดเจ็บเรื้อรังได้จริง
อย่างไรก็ตาม รองเท้าวิ่งยังมีประโยชน์ในบางจุด เช่น:
- ดูดซับแรงกระแทก
- ป้องกันพื้นผิวขรุขระ
- ควบคุมการ pronation ที่มากเกินไป ซึ่งอาจลดแรงลงที่พังผืดใต้เท้าและเอ็นร้อยหวาย
13.3. เชื่อมโยงข้อมูลชีวกลศาสตร์กับการแพทย์
แม้เราจะเข้าใจกลไกของแรงมากขึ้นแล้ว แต่การนำความรู้นี้ไปใช้ยังต้องพัฒนาอีกมาก โดยเฉพาะ:
- การคำนวณแรงแยกตามกล้ามเนื้อและกระดูกแต่ละส่วน
- การวิเคราะห์การเคลื่อนไหวแบบ 3 มิติของเท้า
- การสร้างแบบจำลอง (modeling) ที่แพทย์เข้าใจและใช้งานได้จริง เช่น ภาพเคลื่อนไหวหรือวิดีโอ
References (Running Gait by Tom F. Novacheck:)
[1] Encyclopedia Britannica, 1952:234.
[2] Cavanagh PR. The mechanics of distance running: a historical perspective. In: Cavanagh PR, editor. Biomechanics of Distance Running. Champaign, IL: Human Kinetics Publishers, 1990; Chapter 1:1–34.
[3] Hanks GA, Kalenak A. Running injuries. In: Grana WA, Kalenak A, editors. Clinical Sports Medicine. Philadelphia: W.B. Saunders Company, 1982:458–65.
[4] Renstrom PA. Mechanism, diagnosis, and treatment of running injuries. AAOS Instructional Course Lectures 1993;42:225–34.
[5] O’Brien M. Functional anatomy and physiology of tendons. Clin Sports Med 1992;11(3):505–20.
[6] Booth FW, Gould EW. Effects of training and disuse on connective tissue. Exer Sport Sci Rev 1975;3:83–112.
[7] Leadbetter WB. Cell-matrix response in tendon injury. Clin Sports Med 1992;11(3):533–78.
[8] James SL, Jones DC. Biomechanical aspects of distance running injuries. In: Cavanagh PR, editor. Biomechanics of Distance Running. Human Kinetics Books, 1990:249–269.
[9] Brewer B. Mechanism of injury to the musculotendinous unit. AAOS Instructional Course Lectures, 1960;14.
[10] Clement DB, Taunton JE, Smart GW. Achilles tendinitis and peritendinitis: etiology and treatment. Am J Sports Med 1984;12(3):179–84.
[11] Galloway MT, Jokl P, Dayton DW. Achilles tendon overuse injuries. Clin Sports Med 1992;11(4):771–82.
[12] Hoeberigs JH. Factors related to the incidence of running injuries. Sports Med 1992;13(6):408–22.
[13] Järvinen M. Epidemiology of tendon injuries in sports. Clin Sports Med 1992;11(3):493–504.
[14] Kibler WB. Clinical implications of exercise: injury and performance. AAOS Instructional Course Lectures 1994;43(4):17–24.
[15] Guten GN, editor. Running Injuries. Philadelphia, PA: W.B. Saunders, 1997.
[16] Vaughan CL. Biomechanics of running gait. Crit Rev Eng 1984;12(1):1–48.
[17] Cavanagh PR. The biomechanics of lower extremity action in distance running. Foot Ankle 1987;7(4):197–217.
[18] Williams KR. Biomechanics of running. Exer Sport Sci Rev 1985;13:389–421.
[19] Anderson T. Biomechanics and running economy. Sports Med 1996;22(2):76–89.
[20] Adelaar RS. The practical biomechanics of running. Am J Sports Med 1986;14(6):497–500.
[21] Alexander RM. Running. The Human Machine. Natural History Museum Publications, London 1992:74–87.
[22] Cavanagh PR, editor. Biomechanics of Distance Running. Champaign, IL: Human Kinetics, 1990.
[23] James SL, Brubaker CE. Biomechanics of running. Orthop Clin North Am 1973;4(3):605–15.
[24] James SL. Running injuries to the knee. AAOS J 1995;3(6):309–18.
[25] Andriacchi TP, Kramer GM, Landon GC. The biomechanics of running and knee injuries. In: Finerman G, editor. AAOS Symposium on Sports Medicine: The Knee. St. Louis: CV Mosby, 1985:23–32.
[26] Winter DA, Bishop PJ. Lower extremity injury-biomechanical factors associated with chronic injury to the lower extremity. Sports Med 1992;14(3):149–56.
[27] Kerr BA, Beauchamp L, Fisher V, Neil R. Footstrike patterns in distance running. In: Nigg BM, Kerr BA, editors. Biomechanical Aspects of Sport Shoes and Playing Surfaces. Calgary: University Printing. 1983:135–142.
[28] Gage JR. An overview of normal walking. AAOS Instructional Course Lectures 1990;39:291–303.
[29] DeVita P. The selection of a standard convention for analyzing gait data. J Biomech 1994;27(4):501–8.
[30] Ounpuu S. The biomechanics of running: a kinematic and kinetic analysis. AAOS Instructional Course Lectures 1990;39:305–18.
[31] Novacheck TF. Walking, running, and sprinting: a three-dimensional analysis of kinematics and kinetics. AAOS Instructional Course Lectures 1995;44:497–506.
[32] Mann RA, Hagy J. Biomechanics of walking, running, and sprinting. Am J Sports Med 1980;8(5):345–50.
[33] Inman VT, Ralston HJ, Todd F. Human walking. Baltimore: Williams and Wilkins, 1981:103–117.
[34] Ounpuu S. The biomechanics of walking and running. Clin Sports Med 1994;13(4):843–63.
[35] Mann RA. Biomechanics of walking, running, and sprinting. Am J Sports Med 1980;8(5):345–50.
[36] Sherif MH, Gregor RJ, Liu LM, Roy RR, Hager CL. Correlation of myoelectric activity and muscle force during selected cat treadmill locomotion. J Biomech 1883;16:691–701.
[37] Grieve DW. The assessment of gait. Physiotherapy 1969;55:452–60.
[38] Miller DI. Biomechanics of running: what should the future hold? Can J Sport Sci 1978;3:229–36.
[39] Novacheck TF. The biomechanics of running and sprinting. In: Guten GN, editor. Running Injuries. Philadelphia: W.B. Saunders, 1997;2:4–19.
[40] Novacheck TF, Trost JP. Running: Injury mechanisms and training strategies, 1997. Instructional Videotape. Gillette Children’s Specialty Healthcare Foundation.
[41] Munro CF, Miller DI, Fuglevand AJ. Ground reaction forces in running: a reexamination. J Biomech 1987;20(2):147–55.
[42] Cavanagh PR. Ground reaction forces in distance running. J Biomech 1980;13(5):397–406.
[43] Williams KR, Cavanagh PR, Ziff JL. Biomechanical studies of elite female distance runners. Int J Sports Med 1987;8(2):107–18.
[44] Hinrichs RN. Upper extremity function in distance running. In: Cavanagh PR, editor. Biomechanics of Distance Running. Champaign, IL: Human Kinetics, 1990;4:107–133.
[45] Novacheck TF, Trost JP, Schutte L. Running and Sprinting: A Dynamic Analysis (Video/CD-ROM). St. Paul, MN: Gillette Children’s Hospital, 1996.
[46] Roberts TJ, Marsh RL, Weyand PG, Taylor CR. Muscular force in running turkeys: the economy of minimizing work. Sci Mag 1997;275:1113–5.
[47] McMahon TA. Spring-like properties of muscles and reflexes in running: multiple muscle systems. Biomech Movement Org 1990;37:578–90.
[48] Ker RF, Bennett MB, Bibby SR, Kester RC, Alexander RM. The spring in the arch of the human foot. Nature 1987;325:147–9.
[49] Farley CT, Gonzalez O. Leg stiffness and stride frequency in human running. J Biomech 1996;29(2):181–6.
[50] Jacobs R, Bobbert MF, van Ingen Schenau GJ. Mechanical output from individual muscles during explosive leg extensions: the role of biarticular muscles. J Biomech 1996;29(4):513–23.
[51] Prilutsky BI, Zatsiorsky VM. Tendon action of two-joint muscles: transfer of mechanical energy between joints during jumping, landing, and running. J Biomech 1994;27(1):25–34.
[52] Robertson GE, Winter DA. Mechanical energy generation, absorption and transfer amongst segments during walking. J Biomech 1980;13:845–54.
[53] Martin PE, Morgan DW. Biomechanical considerations for economical walking and running. Med Sci Sports Exer 1992;24(4):407–74.
[54] Cavanagh PR, Williams KR. The effect of stride length variation on oxygen uptake during distance running. Med Sci Sports Exer 1982;14:30–5.
[55] Hill AV. The maximum work and mechanical efficiency of human muscles, and their most economical speed. J Physiol 1922;56:19–41.
[56] Shorten MR, Wootton SA, Williams C. Mechanical energy changes and the oxygen cost of running. Engin Med 1981;10:213–7.
[57] Kram R, Taylor CR. Energetics of running: a new perspective. Nature 1990;346:265–86.
[58] Czerniecki JM. Foot and ankle biomechanics in walking and running. A review. Am J Phys Med Rehab 1988;67(6):246–52.
[59] Chan CW, Rudine A. Foot biomechanics during walking and running. Mayo Clin Proc 1994;69(5):448–61.
[60] Rodgers MM. Dynamic biomechanics of the normal foot and ankle during walking and running. Phys Ther 1988;68(12):1822–30.
[61] Mann RA. Biomechanics of the foot and ankle. In: Mann RA, editor. Surgery of the Foot, 5th Ed. CV Mosby, 1986;1:1–30.
[62] Abuzzahab FS Jr, Harris GF, Kidder SM. A kinetic model of the foot and ankle. Abstract, North American Society of Gait and Clinical Movement Analysis, 1997.
[63] Abu-Faraj ZO, Sampath G, Smith PA. A clinical system for analysis of pediatric foot and ankle motion. Abstract, North American Society of Gait and Clinical Movement Analysis, 1997.
[64] Areblad J, Nigg BM, Ekstrand J, Olsson KO, Ekstrom H. Three-dimensional measurement of rearfoot motion during running. J Biomech 1990;23(9):933–40.
[65] Scott SH, Winter DA. Talocrural and talocalcaneal joint kinematics and kinetics during the stance phase of walking. J Biomech 1991;24(8):743–52.
[66] Engsberg JR, Andrews JG. Kinematic analysis of the talocalcaneal/talocrural joint during running support. Med Sci Sports Exer 1987;19(3):275–84.
[67] Soutas-Little RW, Beavis GC, Verstraete MC, Markus TL. Analysis of foot motion during running using a joint co-ordinate system. Med Sci Sports Exer 1987;19(3):285–93.
[68] Clarke TE, Frederick EC, Hammill CL. The study of rearfoot movement in running. In: Frederick EC, editor. Sport Shoes and Playing Surfaces. Champaign, IL: Human Kinetics, 1984:166–189.
[69] Hennig EM, Cavanagh PR, MacMillian NH. A piezoelectric method of measuring the vertical contact stress beneath the human foot. J Biomed Eng 1982;4(3):213–22.
[70] Cavanagh PR. The Running Shoe Book. Anderson World, California, 1980.
[71] Nigg BM, Denoth J, Luethi S, Stacoff A. Methodological aspects of sport shoe and sport floor analysis. 8th International Congress on Biomechanics, Nagoya, 1981.
[72] Nigg BM. External force measurements with sport shoes and playing surfaces. In: Nigg DM, Kerr BA, editors. University of Calgary, 1983:11.
[73] Bates BT, Osternig LR, Sawhill JA, James SL. An assessment of subject variability, subject-shoe interaction and the evaluation of running shoes using ground reaction force data. J Biomech 1983;16:181.
[74] Bates BT, Osternig LR, Sawhill JA, James SL. Design of running shoes. In: Shoup and Thacker, editors. ASME, New York, 1980.
[75] Clarke TE, Frederick EC, Cooper LB. Biomechanical measurement of running shoe cushioning properties. In: Nigg DM, Kerr BA, editors. University of Calgary, 1983:25.
[76] Pink MM, Jobe FW. The foot/shoe interface. In: Guten GN, editor. Running Injuries. Philadelphia: W.B. Saunders, 1997;3:20–29.
[77] Cook SD, Kester MA, Brunet ME, Haddad RJ Jr. Biomechanics of running shoe performance. Clin Sports Med 1985;4(4):619–26.
[78] Shorten MR. The energetics of running and running shoes. J Biomech 1993;26(1):41–51.
[79] Winter DA. Moments of force and mechanical power in jogging. J Biomech 1983;16(1):91–7.
[80] Scott SH, Winter DA. Internal forces at chronic running injury sites. Med Sci Sports Exer 1989;22(3):357–69.
[81] Orchard JW, Fricker PA, Abud AT, Mason BR. Biomechanics of iliotibial band friction syndrome in runners. Am J Sports Med 1996;24(3):375–9.
[82] Kibler WB, Goldberg C, Chandler TJ. Functional biomechanical deficits in running athletes with plantar fasciitis. Am J Sports Med 1991;19(1):66–71.
[83] Nigg BM, Bobbert M. On the potential of various approaches in load analysis to reduce the frequency of sports injuries. J Biomech 1990;3(Suppl 1):3–12.
